10. Modely dravce a kořisti#
Jako modely dravce a kořisti se nazývají modely zpravidla dvou populací, kdy jedna z populací (kořist) se přirozeně rozmnožuje a rychlost jejího růstu je zpomalována působením predátora, zatímco druhá z populací (predátor) má bez přítomnosti kořisti negativní rychlost růstu a může růst pouze v přítomnosti dostatečného množsví kořisti.
Více o ekologickém pozadí těchto modelů viz [3] kapitola 10.
10.1. Lotkův a Volterrův model#
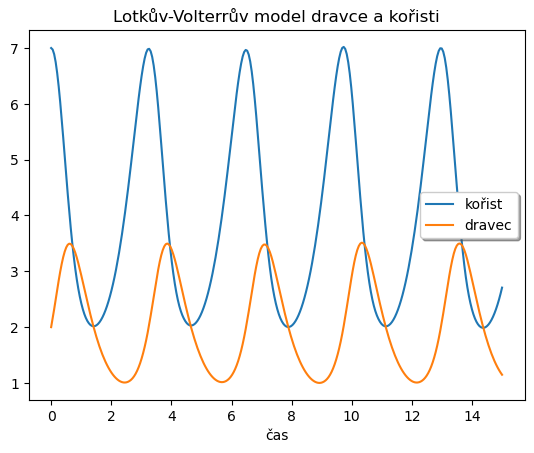
Lotkův Volterrův model jsme poznali v úvodní kapitole k autonomním systémům. Tento model předpokládá rychlost růstu úměrnou velikosti populace kořisti (není tedy zahrnuta nosná kapacita prostředí a s ní související vnitrodruhová konkurence) a tato rychlost je snižována přítomností dravce rychlostí úměrnou velikosti populace dravce i kořisti. O populaci dravce se v tomto modelu předpokládá, že bez potravy vymírá rychlostí úměrnou velikosti této populace a kladný člen vyjadřující růst populace v přítomnosti kořisti je úměrný velikostem obou populací, tj. velikosti populace dravce i kořisti. Přestože model přirozeně ignoruje nosnou kapacitu prostředí, nemusí tato skutečnost model diskvalifikovat z aplikací, protože samotná přítomnost predátora může způsobit, že populace kořisti je trvale dostatečně pod nosnou kapacitou a mezidruhová konkurence v populaci kořisti nemá příliš velký vliv.
Jsou-li \(x\) a \(y\) velikosti populací kořisti a dravce, má matematický model tvar
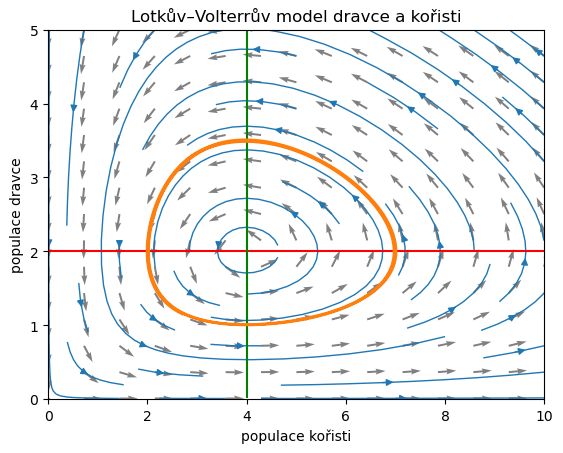
Řešením tohoto modelu jsou periodické trajektorie. Ve cvičení prozkoumáme, zda mají všechny trajektorie stejnou periodu, či nikoliv.
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
from scipy.integrate import solve_ivp
Show code cell source
def prey(x,y,a=2,b=1):
return a*x - b*x*y
def predator(x,y,c=2,d=0.5):
return -c*y+d*x*y
def model(t,X):
x,y = X
return [prey(x,y),predator(x,y)]
meze = [0,15]
pocatecni_podminka = [7, 2]
t = np.linspace(*meze, 300)
sol = solve_ivp(
model,
meze, # interval pro reseni
pocatecni_podminka, # pocatecni podminka
t_eval=t
)
plt.plot(t, sol.y.T)
plt.xlabel('čas')
plt.legend(['kořist', 'dravec'], shadow=True)
plt.title('Lotkův-Volterrův model dravce a kořisti')
plt.show()
Show code cell source
x, y = np.meshgrid(np.linspace(0.01, 10, 15),
np.linspace(0.01, 5, 15))
# Komponenty vektoroveho pole
u,v = model(0,[x,y])
M = np.sqrt(u**2+v**2) # velikost vektoru
fig,ax = plt.subplots()
ax.quiver(x,y,u/M,v/M,color='gray',units='xy', angles='xy') # vykresleni s jednotkovou delkou
integralni_krivky = ax.streamplot(x, y, u, v, density=0.5, linewidth=1)
t = np.linspace(*meze,800)
reseni = solve_ivp(model,
meze,
pocatecni_podminka,
t_eval = t
)
x_nulcline = plt.contour(x, y, prey(x,y), [0], colors='red')
y_nulcline = plt.contour(x, y, predator(x,y), [0], colors='green')
ax.plot(*reseni.y)
ax.set(
ylim=(0,None),
xlim=(0,None),
xlabel="populace kořisti",
ylabel="populace dravce",
title="Lotkův–Volterrův model dravce a kořisti");
10.2. Rosenzweigův a MacArthurův model#
Obecněji je možné předpokládat růst populace kořisti závislý na hustotě populace a nelineární trofickou funkci predátora. Toto vede na model
Show code cell source
def predator(x,y,c=0.04, d=0.1, m=4):
return -c*y + d*x*y/(m+x)
def prey(x,y,r=1, b=0.3, K=10, m=4):
return r*(1-x/K)*x-b*x*y/(m+x)
def model(t,X):
x,y = X
return [prey(x,y),predator(x,y)]
meze = [0,400]
t = np.linspace(*meze,2000)
pocatecni_podminky = [[2,12],[4,16],[2.5,16]]
populace = ["kořist","dravec"]
df = pd.DataFrame(
columns = pd.MultiIndex.from_product(
[
[i for i in range(len(pocatecni_podminky))],
populace
], names = ['počáteční podmínka', 'populace'])
)
for i,pocatecni_podminka in enumerate(pocatecni_podminky):
reseni = solve_ivp(model,
meze,
pocatecni_podminka,
t_eval = t
).y.T
df[[(i,j) for j in populace]] = reseni
df
| počáteční podmínka | 0 | 1 | 2 | |||
|---|---|---|---|---|---|---|
| populace | kořist | dravec | kořist | dravec | kořist | dravec |
| 0 | 2.000000 | 12.000000 | 4.000000 | 16.000000 | 2.500000 | 16.000000 |
| 1 | 2.081806 | 11.985075 | 3.999522 | 16.032045 | 2.505855 | 15.995163 |
| 2 | 2.167149 | 11.972333 | 3.998101 | 16.064135 | 2.511873 | 15.990508 |
| 3 | 2.256029 | 11.961797 | 3.995754 | 16.096251 | 2.518052 | 15.986038 |
| 4 | 2.348415 | 11.953486 | 3.992499 | 16.128375 | 2.524389 | 15.981757 |
| ... | ... | ... | ... | ... | ... | ... |
| 1995 | 3.346472 | 17.636679 | 1.248762 | 14.006835 | 1.082455 | 15.550477 |
| 1996 | 3.310200 | 17.655847 | 1.267999 | 13.961871 | 1.077136 | 15.492260 |
| 1997 | 3.273730 | 17.674061 | 1.288441 | 13.917847 | 1.072496 | 15.434021 |
| 1998 | 3.237050 | 17.691302 | 1.310128 | 13.874797 | 1.068537 | 15.375796 |
| 1999 | 3.200145 | 17.707555 | 1.333098 | 13.832754 | 1.065264 | 15.317619 |
2000 rows × 6 columns
Show code cell source
fig,axs = plt.subplots(2,sharex=True)
axs[0].plot(t,df.xs(key="kořist",level=1,axis=1))
axs[1].plot(t,df.xs(key="dravec",level=1,axis=1))
for ax in axs:
ax.grid()
ax.set(ylabel="velikost populace")
axs[0].set(title="Kořist")
axs[1].set(xlabel="čas",title="Dravec")
plt.suptitle("Rosenzweigův a MacArthurův model dravce a kořisti")
plt.tight_layout();
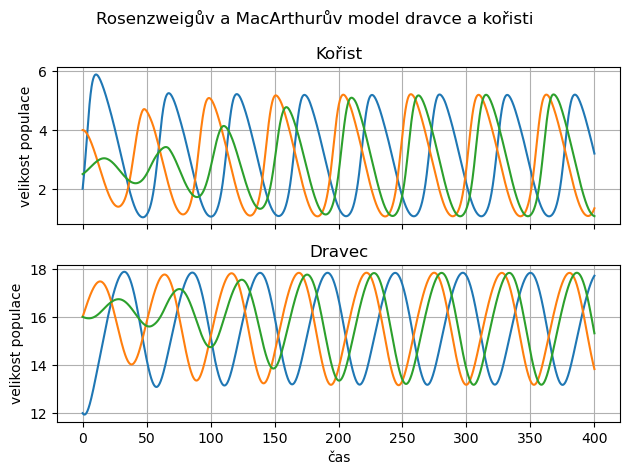
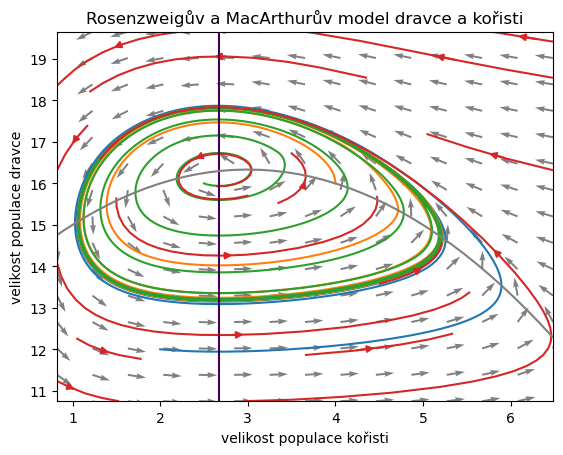
Nedostatkem Lotkova–Volterrova modelu to, že perioda cyklů závisí na počátečních podmínkách. Model Rosenzweigův a MacArthurův tímto nedostatkem netrpí, protože obsahuje jenom jeden cyklus a všechny trajektorie k němu konvergují. Perioda oscilujících řešení tedy bude stejná a řešení mohou být nanejvýš fázově posunuta, což je vidět z časového průběhu. Jednoznačnost cyklu je identifikovatelná z fázového portrétu.
Show code cell source
fig,ax = plt.subplots()
for i in range(len(pocatecni_podminky)):
ax.plot(*df[i].values.T)
ax.set(
xlabel="velikost populace kořisti",
ylabel="velikost populace dravce",
title="Rosenzweigův a MacArthurův model dravce a kořisti")
plt.tight_layout();
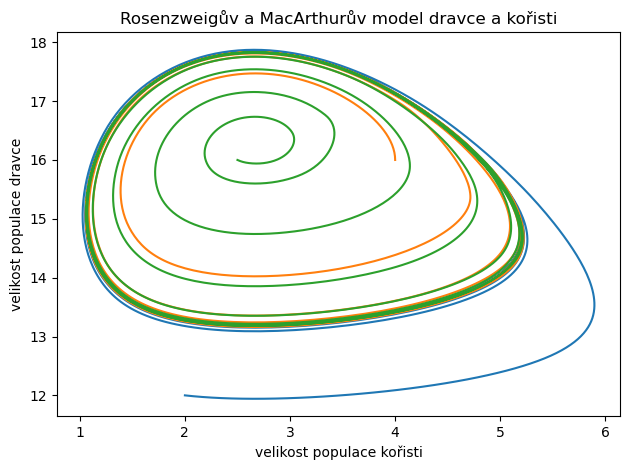
Kvůli překryvu křivek je možná vhodnější použít animaci.
Show code cell source
# podle https://stackoverflow.com/questions/43445103/inline-animations-in-jupyter
import matplotlib.animation
plt.rcParams["animation.html"] = "jshtml"
plt.rcParams['figure.dpi'] = 100
plt.ioff()
fig,ax = plt.subplots()
korist = df.xs(key="kořist",level=1,axis=1).values
dravec = df.xs(key="dravec",level=1,axis=1).values
ax.set(
xlabel="velikost populace kořisti",
ylabel="velikost populace dravce",
title="Rosenzweigův a MacArthurův model dravce a kořisti",
xlim=(korist.min()*0.95,korist.max()*1.05),
ylim=(dravec.min()*0.95,dravec.max()*1.05)
)
def animate(t):
if t==0:
ax.set_prop_cycle(None) # reset cyklovače barev
ax.plot(*df[t].values.T)
matplotlib.animation.FuncAnimation(fig, animate, frames=3)
(Předchozí animace vypnula interaktivní kreslení, musíme ho zase zapnout.)
Show code cell source
plt.clf()
plt.ion();
Pro detailnější informaci můžeme do obrázku zahrnout i směrové pole a nulkliny.
Show code cell source
korist = df.xs(key="kořist",level=1,axis=1).values
dravec = df.xs(key="dravec",level=1,axis=1).values
xmin, xmax = korist.min()*0.8, korist.max()*1.1
ymin, ymax = dravec.min()*0.9, dravec.max()*1.1
x, y = np.meshgrid(np.linspace(xmin, xmax, 15),
np.linspace(ymin, ymax, 15))
# Komponenty vektoroveho pole
u,v = model(0,[x,y])
M = np.sqrt(u**2+v**2) # velikost vektoru
fig,ax = plt.subplots()
for i in range(len(pocatecni_podminky)):
ax.plot(*df[i].values.T)
ax.quiver(x,y,u/M,v/M,color='gray',units='xy', angles='xy') # vykresleni s jednotkovou delkou
integralni_krivky = ax.streamplot(x, y, u, v, density=0.3)
x, y = np.meshgrid(np.linspace(xmin, xmax, 40),
np.linspace(ymin, ymax, 40))
x_nulcline = plt.contour(x, y, predator(x,y), [0])
y_nulcline = plt.contour(x, y, prey(x,y), [0], colors='gray')
ax.set(
xlabel="velikost populace kořisti",
ylabel="velikost populace dravce",
title="Rosenzweigův a MacArthurův model dravce a kořisti",
);
<Figure size 640x480 with 0 Axes>
Poznámka: Zkuste změnou parametru \(c\) regulovat úmrtnost dravce. Všimněte si, že se model může stabilizovat, tj. nemusí docházet k oscilacím, ale populace mohou setrvávat na rovnovážné poloze. I toto v přírodě pozorujeme, že stavy dravce a kořisti (nebo býložravce a rostliny) jsou dlouhodobě stabilní.