5. Bifurkace#
Co se dozvíte v tomto textu

V tomto textu se budeme věnovat vlivu parametrů na chování řešení diferenciální rovnice. Zvláštní pozornost bude věnována situacím, kdy může dojít ke jiným než plynulým změnám fázového portrétu, například zániku nebo ztrátě stability stacionárního bodu.
Techniky sledující závislost řešení na parametrech jsou zásadním při managementu populací, zejména při návrhu trvale udržitelného lovu. Historicky byly nejprve rozpracovány pro rybolov, aby byl přehled o důsledcích lovu na život v oceánech.
Kromě základní metodiky a aplikací na lov populace se seznámíme i s problematikou redukce populace škůdce působením predátorů a následky, které mohou nastat při překročení hranice, při které se mění struktura stacionárních bodů modelu, jejich počet a stabilita.
Foto: S bifurkacemi se setkáváme v situacích, kdy se podstatně mění chování systému. V praxi to může znamenat například zhroucení ekosystému, jak se několikrát stalo v případě nadměrného rybolovu. Na snímku rybářské sítě pro rybolov malého rozsahu. Anoop Negi, https://www.flickr.com/photos/ezee123/117560929
Jak jsme viděli v předešlých modelech, v praxi naše modely obsahují parametry. Tyto parametry ovlivňují chování modelu v několika ohledech.
Zpravidla se stává, že malé změny parametrů mají malý vliv na chování řešení. Ovlivní pouze polohu stacionárních stavů a rychlost konvergence řešení do těchto bodů, ale při malé změně parametrů se zpravidla stacionární body posunují o malé hodnoty a jejich počet i jejich stabilita zůstávají zachovávány. V zásadě se pro všechny hodnoty parametru řešení chovají pořád stejně. To jsme viděli například u diferenciální rovnice ochlazování
Někdy se však stane, že změna parametru při překročení nějaké hodnoty vyvolá velkou změnu chování systému. Například zanikne nebo vznikne nový stacionární bod, nebo se změní jeho stabilita. V takovém případě říkáme, že rovnice má v daném bodě bifurkaci. Příslušná hodnota parametru se nazývá bifurkační hodnota.
5.1. Bifurkace v logistické diskrétní rovnici#
Nejjednodušší je pozorovat bifurkaci na diskrétní obdobě logistické rovnice, na rovnici
Rovnice má pro malé \(r\) stacionární bod a řešení konverguje podobně jako u spojité logistické rovnice k nosné kapacitě prostředí. Pokud hodnotu \(r\) zvyšujeme, stacionární bod se posunuje, ale jinak se nic neděje dokud nepřekročíme jistý kritický bod. Za hodnotou \(r=3\) už řešení přestává konvergovat k jedné hodnotě, ale přeskakuje mezi dvěma hodnotami, má cyklus s periodou 2. Při dalším zvyšování se jenom posunují body, mezi kterými řešení osciluje, dokud se nedostaneme k další kritické hodnotě. Pro \(r\) mezi přibližně 3.44949 a 3.54409 začne řešení periodicky přeskakovat mezi čtyřmi hodnotami a jedná se tedy o cyklus s periodou 4.
Pro hodnoty parametru \(r\) použité v obrázcích se řešení buď ustálí na konstantní hodnotě, nebo vznikne cyklus s periodou dva nebo cyklus s periodou čtyři. V posledním případě dokonce vznikne zdánlivě chaotické chování, které je ve skutečnosti cyklem s s dlouhou periodou.
Show code cell source
import numpy as np # knihovna pro numerické výpočty
import matplotlib.pyplot as plt # knihovna pro grafiku
import pandas as pd # knihovna pro práci s tabulkami
from scipy.integrate import solve_ivp, cumulative_trapezoid
Show code cell source
N = 80
r = np.array([2.4,3.2,3.5,3.9])
data = np.full((N,4),0.1)
for i in range(N-1):
data[i+1] = r * data[i] * (1-data[i])
df = pd.DataFrame(data, columns=r)
ax = df.plot(
subplots=True,
layout=(2,2),
legend=False
)
for a,j in zip(ax.flatten(),r):
a.set(
ylim=(0,1),
title=(rf"$r={j}$")
)
plt.suptitle("Diskrétní logistická rovnice");
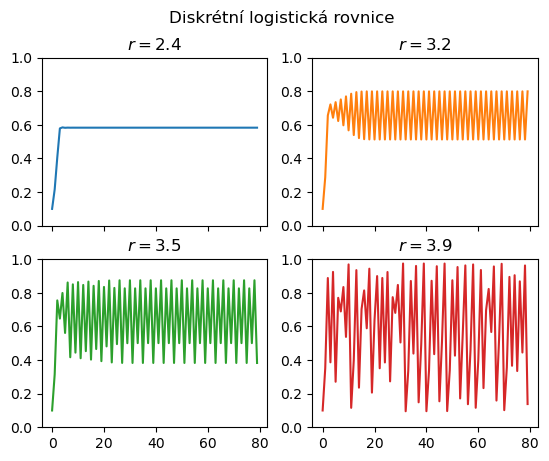
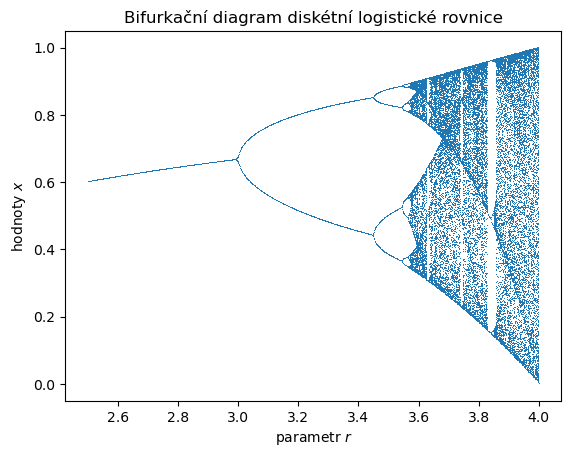
Vidíme, že chování rovnice je velice pestré. Následující diagram je takzvaný bifurkační diagram této rovnice. Na vodorovné ose je hodnota parametru. Pokud parametru odpovídá jedna hodnota na svislé ose, řešení se ustálí na dané hodnotě. Pokud více, řešení mezi těmito hodnotami přeskakuje v cyklu. V místě, kde se křivka rozdvojuje se mění počet hodnot, mezi kterými řešení přeskakuje a mění se tedy perioda cyklu, ke kterému řešení konverguje. V takovém bodě má rovnice bifurkaci.
Čím více průsečíků má graf se svislou přímkou, tím větší je perioda řešení a tím chaotičtější je systém, protože se střídají řádově desítky či stovky hodnot.
Show code cell source
r_hodnoty = np.linspace(2.5, 4.0, 1000)
x0 = 0.5
N = 500
pocet = 100
def log_rce_tail(r):
x = np.zeros(N)
x[0] = x0
for i in range(N-1):
x[i+1]=(r * x[i] * (1 - x[i]))
return x[-pocet:]
x_hodnoty = [log_rce_tail(r) for r in r_hodnoty]
plt.plot(r_hodnoty, x_hodnoty, ",", color="C0")
ax = plt.gca()
ax.set (
xlabel='parametr $r$',
ylabel='hodnoty $x$',
title='Bifurkační diagram diskétní logistické rovnice'
);
5.2. Logistický růst a dvě strategie lovu#
Předpokládejme, že populace vyvíjející se podle logistické rovnice a populace je vystavena lovu, odchytu či těžbě. Naším cílem je zjistit, jaké bude mít tento lov důsledky na stav a vývoj populace.
5.2.1. Konstantní intenzita lovu#
Předpokládejme, že lov je prováděn tak, že rychlost, s jakou odebíráme jedince z populace, je konstantní. Označme tuto rychlost \(h\). Model vývoje populace má tedy tvar
Nejprve zredukujeme počet parametrů. Rovnici je možno přepsat do tvaru
Tip
Téhož tvaru bezrozměrné rovnice dosáhneme, pokud budeme velikost populace měřit v násobcích nosné kapacity prostředí a čas v takových jednotkách, aby byl bez lovu invazní parametr roven jedné. Tedy aby bez lovu malá populace rostla rychlostí odpovídající dosažení nosné kapacity prostředí za jednotku času. V praxi se často tato úvaha odbude tvrzením „invazní parametr a nosnou kapacitu prostředí můžeme bez újmy na obecnosti položit rovny jedné“.
Funkce stojící na pravé straně diferenciální rovnice v rozdílu si vykreslíme.
Show code cell source
h1,h2 = 0.13,0.27
N = 100
x = np.linspace(0,1.1,N)
def logisticky_rust(x,r=1,K=1,h=0):
return r*x*(1-x/K)
df = pd.DataFrame(index=x)
df["Logistický růst"] = logisticky_rust(x)
df["Lov nízké intenzity"] = np.full(N,h1)
df["Lov vysoké intenzity"] = np.full(N,h2)
ax = df.plot()
ax.set(
title="Logistický růst s konstantním lovem",
ylim=(-0.01,None),
xlabel=r"bezrozměrná velikost populace",
ylabel="bezrozměrná rychlost růstu/poklesu populace",
)
ax.grid()
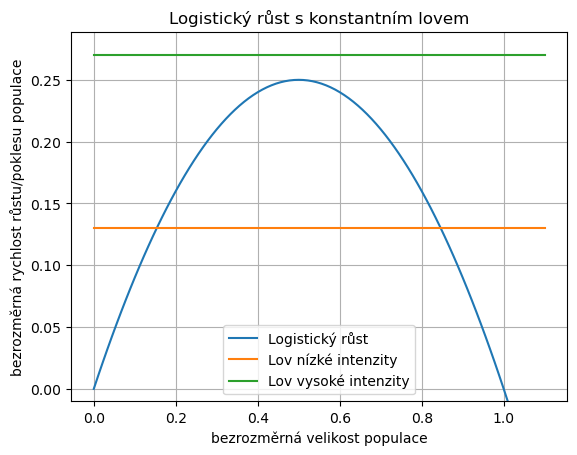
Grafem funkcí, jejichž rozdíl figuruje na pravé straně rovnice, jsou parabola řídící růst a vodorovná přímka vyjadřující lov. Změnou intenzity lovu se vodorovná přímka posunuje nahoru (zvýšení), či dolů (snížení). Pro lov nízkou intenzitou má přímka s parabolou dva průsečíky a ty se posunují, jak se vodorovná přímka posunuje nahoru nebo dolů. Pro lov s vysokou intenzitou průsečíky zaniknou.
Pro vysoký lov tedy je rozdíl růstu a poklesu záporný a velikost populace klesá v čase. Tato rychlost poklesu je minimálně tak velká, jako vzdálenost vodorovné přímky od vrcholu paraboly a proto není možné očekávat, že by se pokles zastavil tak, že řešení konverguje k vodorovné asymptotě. V této situaci populace nepřežije a lov ji zlikviduje.
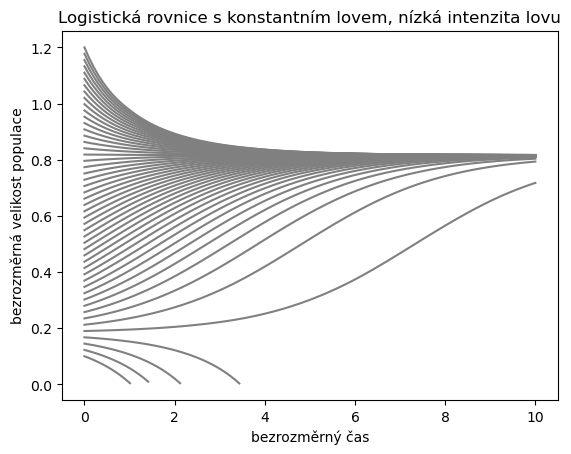
Pro lov nízké intenzity mají křivky růstu a poklesu dva průsečíky. Nalevo od prvního průsečíku převažuje pokles nad růstem a populace vymře. Napravo od druhého průsečíku také převažuje pokles nad přírůstkem, populace vymírá, ale toto vymírání se zastaví ve stacionárním bodě odpovídajícím tomuto průsečíku. Mezi stacionárními body převažuje růst nad lovem a populace roste.
Model ukazuje, že pro vysoké hodnoty lovu populace zanikne a pro rozumné hodnoty lovu přežívá. Toto přežívání je podmíněno tím, že velikost populace na začátku vývoje není pod nestabilním stacionárním bodem a ani pod něj náhodnými fluktuacemi neklesne.
Show code cell source
pocatecni_podminka = np.linspace(0.1,1.2,50)
meze = [0,10]
t = np.linspace(*meze,100)
def destrukce_populace(t,x): # Pokud x klesne na nulu, zastavíme výpočet
return x
destrukce_populace.terminal = True
def rovnice(t, x, r=1, K=1, h=0.15):
return r*x*(1-x/K)-h
# Pro různé počáteční podmínky se bude lišit interval,
# na kterém algoritmus najde řešení. Proto nemůžeme data
# shrnout do jedné tabulky.
reseni = [ solve_ivp(
rovnice,
meze,
[pp],
t_eval=t,
events=destrukce_populace,
)
for pp in pocatecni_podminka]
fig, ax = plt.subplots(1)
for i in reseni:
ax.plot(i.t,i.y[0],"gray")
ax.set(
title="Logistická rovnice s konstantním lovem, nízká intenzita lovu",
xlabel="bezrozměrný čas",
ylabel="bezrozměrná velikost populace"
);
Bifurkační diagram je na obrázku. Pro různé hodnoty parametru je na něm možné najít polohu stacionárních bodů a identifikovat jejich stabilitu. Pro hodnotu \(h=0.25\) nastává bifurkace, kdy při zvyšování lovu splývají a zanikají oba stacionární body.
Show code cell source
N_stabilni = np.linspace(0.5,1)
N_nestabilni = np.linspace(0,0.5)
for N,typ,popisek in zip(
[N_stabilni,N_nestabilni],
["-","--"],
["stabilní","nestabilní"]
):
plt.plot(N*(1-N),N,typ,label=popisek)
for i in [0,0.05,0.10,0.15,0.20]:
dy=0.05;
plt.arrow(
i,0.5-np.sqrt(0.25-i)+dy,
0,2*np.sqrt(0.25-i)-4*dy,
lw=1, color="gray", head_width=0.01, head_length = 0.1, overhang=0.5
)
plt.arrow(
i,1.2,
0,-0.55+np.sqrt(0.25-i),
lw=1, color="gray", head_width=0.01, head_length = 0.1, overhang=0.5
)
for i in [0.1,0.15,0.20]:
dy=0.05;
plt.arrow(
i,0.5-np.sqrt(0.25-i)-dy,
0,-(0.4-np.sqrt(0.25-i)),
lw=1, color="gray", head_width=0.01, head_length = 0.1, overhang=0.5
)
plt.arrow(
0.28,1.0,
0,-0.8,
lw=1, color="gray", head_width=0.01, head_length = 0.1, overhang=0.5
)
ax = plt.gca()
ax.set(
title=r"Bifurkační diagram rovnice $\frac{\mathrm{d} x}{\mathrm{d}t}=x(1-x)-h$",
xlabel=r"bifurkační parametr $h$",
ylabel="poloha stacionárních bodů")
plt.legend(title="Stabilita stacionárního bodu", loc="upper right");
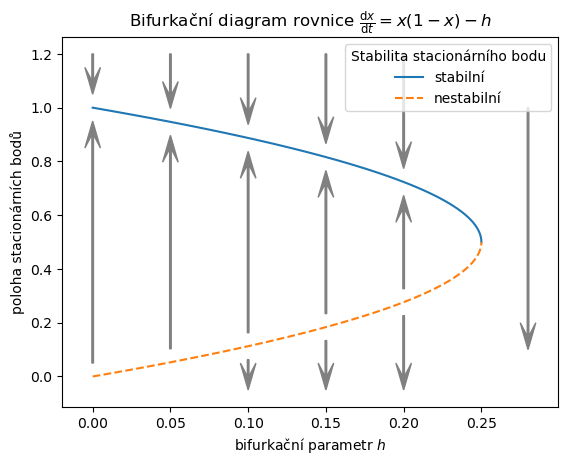
Pro přežívání populace je nutné hlídat, aby populace nikdy neklesla pod kritickou hodnotu vedoucí k vymření populace. Proto je dobré udržovat hodnotu lovu na takové úrovni, aby vzdálenost mezi stabilním a nestabilním stacionárním bodem byla dostatečně velká, aby náhodné perturbace, ke kterým může kdykoliv dojít, nesnížily velikost populace pod nestabilní práh. V takovém případě při poklesu populace není nutné měnit strategii lovu, populace drobné fluktuace vyrovná sama svými přirozenými růstovými mechanismy.
V praxi je nutno buď uvažovat co největší \(h\), abychom měli co největší užitek, sledovat, zda vlivem výkyvů velikost populace neklesá pod kritickou hodnotu a pokud ano tak okamžitě měnit rychlost lovu nebo další parametry systému (podpořit rozmnožování a pod.). Další alternativou je lovit menší rychlostí \(h\), což nese nižší užitek z lovu, ale ponechává populaci možnost, aby se sama vyrovnala s případnými výkyvy.
Poznamenejme, že v uvedeném modelu má smysl i předpoklad, že koeficient \(h\) je záporný. V takovém případě nemluvíme o záporném lovu, ale příslušný člen interpretujeme jako rychlost imigrace, se kterou uvažovaný druh proniká do dané lokality.
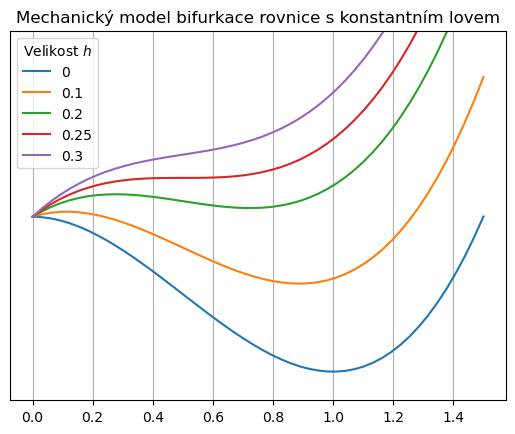
Následující model ukazuje mechanickou představu bifurkace pomocí analogie s kuličkodráhou. Je vykreslen potenciál (záporně vzatý integrál) pravé strany. Ten je možno chápat jako potenciální energii a chování systému je možné přirovnat k chování kuličky pohybující se po kuličkodráze ve stejném tvaru jako je tento potenciál. Pro malé hodnoty lovu má potenciál lokální minimum a v tomto minimu existuje stabilní stacionární stav. S rostoucím lovem je minimum stále méně výrazné a i malá perutbace může kuličku z dolíku vyhodit a kulička se skutálí pryč. Pro kritický lov \(h=0.25\) už lokální minimum zaniká. Pro ještě intenzivnější lov se celá křivka svažuje doleva a kulička se odkutálí pryč.
Show code cell source
x = np.linspace(0,1.5)
for h in [0,0.1,0.2,0.25,0.3]:
potencial = - cumulative_trapezoid(x*(1-x)-h, x, initial=0)
plt.plot(x, potencial, label=h)
plt.gca().set(
ylim=(None,0.2),
title="Mechanický model bifurkace rovnice s konstantním lovem",
yticks=[]
)
plt.legend(title="Velikost $h$")
plt.grid()
5.2.2. Lov úměrný velikosti populace#
Uvažujme strategii lovu spočívající v tom, že rychlost, s jakou lovem snižujeme velikost populace, je úměrná celkové velikosti populace. Malou populaci lovíme málo, větší populaci více. To by odpovídalo například filtrování, kdy odstraňujeme bakterie z živného roztoku.
Matematicky vyjádřeno, populace se vyvíjí podle modelu
V bezrozměrném tvaru má rovnice podobu
Show code cell source
h = 0.2,0.5,0.8,1.3
N = 100
x = np.linspace(0,1.1,N)
def logisticky_rust(x,r=1,K=1,h=0):
return r*x*(1-x/K)
df = pd.DataFrame(index=x)
df["Logistický růst"] = logisticky_rust(x)
df["Lov s nízkým úsilím"] = h[0]*x
df["Lov s optimálním úsilím"] = h[1]*x
df["Lov s vysokým úsilím"] = h[2]*x
df["Lov s extrémním úsilím"] = h[3]*x
ax = df.plot()
ax.set(
title="Logistický růst s lovem s konstantním úsilím",
ylim=(-0.01,.3),
xlabel=r"$\frac {x}{K}$",
ylabel="rychlost růstu/poklesu",
)
ax.grid();
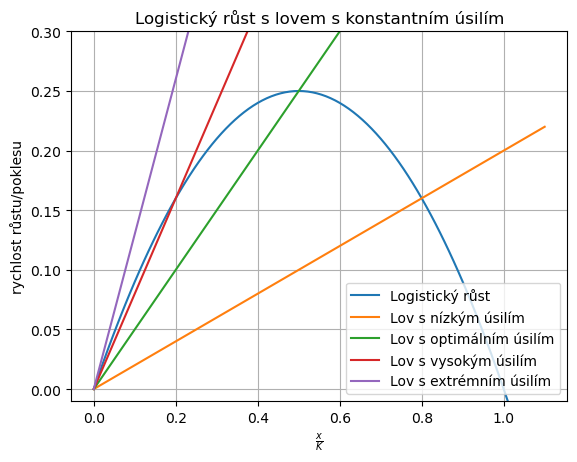
Vidíme, že tato strategie lovu má oproti konstantnímu lovu velkou výhodu: nemá nestabilní stacionární bod. (S výjimkou extrémně vysoké intenzity lovu, kdy je směrnice přímky charakterizující lov v bezrozměrných veličinách větší než jedna.)
Pro praktické provádění této strategie je však nutno znát v každém okamžiku aktuální velikost populace, což může být obtížně zjistitelné, nebo takřka nemožné. V takovém případě je vhodnější použít strategii konstantního lovu. V případě, kdy velikost úlovku je úměrná intenzitě lovu (např. vynaloženému úsilí, kvalitě loveckých pomůcek a pod.), je naopak snadné realizovat strategii s proměnnou rychlostí, protože stačí lovit se stále stejnou intenzitou \(q\).
V praxi se snažíme užitek z lovu maximalizovat a tedy se snažíme o to, aby součin \(qx\) byl v rovnovážném stavu co největší. To znamená, že přímka charakterizující lov prochází vrcholem paraboly. Zvýšení úsilí vede ke strmější přímce, která protíná parabolu níže a celkový užitek z lovu se tedy snižuje.
Kromě toho je pro ekonomicky nejvýhodnější strategii lovu nutno uvažovat, že většího úlovku dosáhneme jenom za použití většího úsilí. Na toto zvýšení úsilí je nutno vynaložit větší ekonomické náklady, které snižují celkový zisk. Je tedy nutno hledat určitou rovnováhu – chceme odlovit co nejvíce jedinců, abychom měli co největší zisk, od určité hranice je však již lov drahý a nevyplácí se. Tato problematika, maximalizace ekonomického profitu, je podrobně rozpracována v odborné literatuře, zejména na příkladech z rybolovu.
5.3. Populace pod predačním tlakem#
Následující model má velký historický význam. Umožnil objasnit, proč v kanadských lesích dochází periodicky k přemnožování obaleče smrkového. Toto je motýl, jehož housenky v době přemnožení dokáží zničit obrovské plochy lesa. Na monitorování situace používala kanadská lesní správa model (Holling, Jones, Clark) obsahující 30 tisíc proměnných, které sledovaly prostorové rozložení populace a její vývoj v čase. Model však nedokázal odpovědět na otázku, proč dochází k periodickému přemnožení. Pokud pochopíme tento proces, budeme schopni mu účinně bránit.
Na vysvětlení uvedeného problému sestavili Ludwig, Jones a Holling model složený ze tří diferenciálních rovnic popisujících dynamiku lesa, housenek obaleče a jejich predátorů, ptáků. My si zde představíme zjednodušení, kdy se budeme věnovat jenom nejrychleji se měnící populaci, populaci housenek obaleče. Tato populace bude pod tlakem predátorů, ptáků a malých savců, kteří se housenkami živí.
5.3.1. Matematický model#
Předpokládejme, že populace predátorů je stabilizovaná a že přežití predátorů není závislé na velikosti populace obaleče. To nastane zejména v případech, kdy má predátor v prostředí i alternativní zdroje potravy a kdy dynamika jeho populace je pomalejší než dynamika populace obaleče.
Situaci budeme modelovat diferenciální rovnicí
Bez přítomnosti kořisti predátoři nic neuloví, tj. \(V(0)=0\).
Je-li více kořisti, predátoři jí neuloví méně, tj. \(V\) je neklesající funkce
Predátoři nemohou ulovit neomezeně mnoho kořisti, ale loví pouze do jisté hladiny nasycení, funkce \(V\) je proto ohraničená.
Je-li populace kořisti malá, predátoři ji téměř neloví, ale dávají přednost dostupnějším zdrojům potravy, funkce \(V\) tedy zpočátku roste pomalu.
Ludwig, Jones a Holling navrhli použít pro funkci \(V\) trofickou funkci typu Holling II ve tvaru
5.3.2. Nondimenzionalizace#
Abychom mohli kvalitativně prozkoumat vlastnosti řešení, pokusíme se zavést bezrozměrné veličiny a tím poněkud zjednodušit pravou stranu rovnice. Budeme se snažit především eliminovat parametry z trofické funkce, protože tento člen na pravé straně rovnice je složitější než člen z rovnice logistického růstu.
Zavedeme novou závisle proměnnou \(x\) substitucí \(N=bx\). Biologicky to znamená, že velikost populace budeme měřit v nových jednotkách, které jsou \(b\)-násobkem původních jednotek. Po této substituci má rovnice tvar
5.3.3. Růstové křivky#
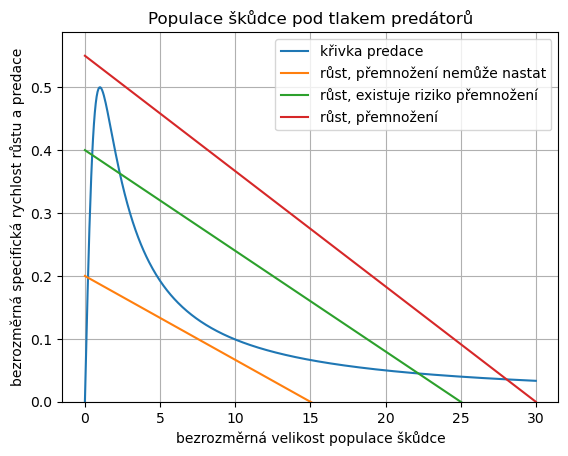
Funkci \(\frac{x}{x^2+1}\) a přímku \(\alpha\left(1-\frac x\beta\right)\) vykreslíme do jednoho grafu. V závislosti na hodnotách parametrů \(\alpha\) a \(\beta\) může vzájemná poloha dopadnout trojím způsobem. Buď se křivky protnou jenom jednou v bodě, kde je hodnota populace malá. Toto nastane pro malou nosnou kapacitu a malý invazní parametr. V takovém případě je populace housenek na nízké úrovni.
Show code cell source
x = np.linspace(0,30,500)
parametry = [[.2,15,"růst, přemnožení nemůže nastat"],
[.4,25,"růst, existuje riziko přemnožení"],
[.55,30,"růst, přemnožení"]]
plt.plot(x,x/(1+x**2),label="křivka predace")
for alpha,beta,text in parametry:
plt.plot(x,alpha*(1-x/beta),label=text)
ax = plt.gca()
ax.set(
ylim=(0,None),
xlabel="bezrozměrná velikost populace škůdce",
ylabel="bezrozměrná specifická rychlost růstu a predace",
title="Populace škůdce pod tlakem predátorů"
)
plt.grid()
plt.legend();
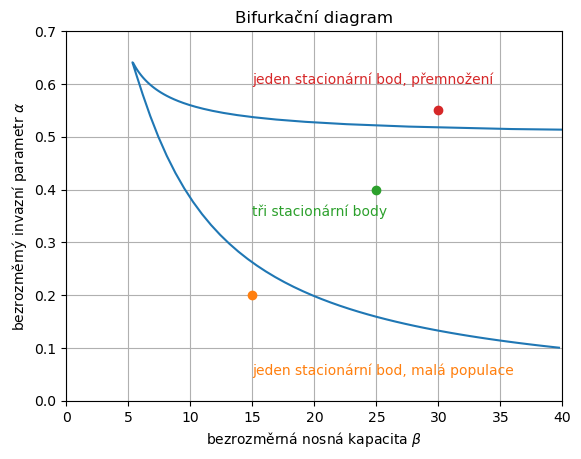
5.3.4. Bifurkační diagram#
V prostoru parametrů můžeme dokonce najít křivky oddělující existenci jednoho stacionárního stavu a tří. Vznikne bifurkační diagram ukazující, pro které hodnoty parametrů jsou možné tři stacionární stavy (dva stabilní a jeden nestabilní) a pro které hodnoty existuje jenom jeden. Tečky v diagramu odpovídají přímkám, které jsou v zachyceny na předchozím obrázku. Barvy si odpovídají, červený bod charakterizuje červenou přímku a podobně.
Show code cell source
x = np.array([np.linspace(1.01,1.5),np.linspace(1.51,20)]).flatten()
y = x/(x**2+1)
dydx = np.gradient(y,x)
body = np.zeros([len(x),2])
i = 0
for x0,y0,dydx0 in zip(x,y,dydx):
r = y0 - dydx0*x0 # pruseciky tecny s osami
K = x0 - y0/dydx0
body[i,:] = [K,r]
i = i+1
plt.plot(*body.T)
ax = plt.gca()
for i,j in enumerate(parametry):
r,K,_ = j
plt.plot([K],[r],"o", color="C"+str(i+1))
for vyska, popisek, barva in [
[0.05,"jeden stacionární bod, malá populace","C1"],
[0.35,"tři stacionární body","C2"],
[0.6,"jeden stacionární bod, přemnožení","C3"],
]:
ax.text(15,vyska,popisek, color=barva)
ax.set(
ylim=(0,.7),
xlim=(0,40),
xlabel=r"bezrozměrná nosná kapacita $\beta$",
ylabel=r"bezrozměrný invazní parametr $\alpha$",
title="Bifurkační diagram"
)
ax.grid();
5.3.5. Závěr#
Model vysvětluje, proč dochází k periodickému přemnožování. Jak les roste, poskytuje větší nosnou kapacitu prostředí pro obaleče a lepší podmínky pro jeho množení. Tím se přímky v diagramu srovnávajícím produkci a predaci dostávají doprava nahoru a z původně jednoho nízkého stacionárního stavu (oranžová přímka) máme tři stacionární stavy s možností přemnožení a malým prahem mezi prvním a druhým stacionárním bodem (zelená přímka) a nakonec jeden stacionární stav znamenající přemnožení. Jakmile k tomuto přemnožení dojde, škůdce zničí les i své životní prostředí a les začíná růst od začátku. Tyto cykly pozorujeme v provincii Nový Brunšvik, protože v jiných provinciích dochází k jiným katastrofám omezujícím růst lesa, například lesní požáry ([9]).
Strategií ochrany lesa je vhodnými opatřeními nedovolit posun parametrů do oblasti, kde je jeden stacionární bod s vysokou hodnotou populace. V takových podmínkách totiž je nízká úroveň populace daleko od stabilního stavu a její udržování je možné pouze za cenu neustálých zásahů a vysokých investic. Po jakémkoliv jednorázovém zredukování populace se rychle obnovuje rovnováha odpovídající vysokým hodnotám. Pro účinný zásah je nutné vhodnými opatřeními zajistit, aby se parametry systému přesunuly do oblasti se třemi stacionárními body a poté dalším zásahem jednorázově zredukovat populaci. Jakmile populaci jednou zredukujeme pod hodnotu odpovídající nestabilními stacionárnímu bodu, bude konvergovat ke stabilnímu stacionárnímu bodu odpovídajícímu malé populaci a obaleč tedy nebude přemnožen.