3. Diferenciální rovnice#
Co se dozvíte v tomto textu

V tomto textu si ukážeme, jak umí věda pracovat s modely spojujícími rychlost měnící se veličiny a hodnotu této veličiny. Zpravidla se jedná o rovnice obsahující neznámou ve formě funkce a v rovnici je i derivace této funkce. Tyto rovnice se nazývají diferenciální rovnice a jsou nejběžnějším modelovacím nástrojem napříč mnoha obory, od biologie přes ekologii a chemii až k fyzice.
Jako ukázku využití si představíme jeden z nejstarších ale dodnes užívaných ekologických modelů, model ostrovní biogeografie slavných ekologů McArthura a Wilsona. Tento model se snaží vysvětlit odlišnosti v ekosystémech na ostrovech a najít podstatu těchto odlišností.
Foto: Jednou z ukázek specifik ostrovních ekosystémů je vzácná endemická liška ostrovní, Urocyon littoralis. Žije na ostrovech u pobřeží Kalifornie. Autor Shanthanu Bhardwaj, https://wikimedia.org
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
Model ochlazování kávy z minulé přednášky byl reprezentantem nové třídy úloh, nazývaných diferenciální rovnice. Roli v něm hrála mimo jiné rychlost změny teploty, tedy derivace teploty podle času. Protože se jedná o derivaci funkce jedné proměnné, jak jsme se s ní seznámili dříve, říká se těmto rovnicím obyčejné diferenciální rovnice. V průběhu semestru se setkáme ještě s dalším typem derivací, parciálními derivacemi. Při jejich použití v matematických modelech dostáváme parciální diferenciální rovnice.
3.1. Obyčejná diferenciální rovnice#
Obyčejná diferenciální rovnice je rovnice, kde vystupuje neznámá funkce a její derivace. Setkáváme se s ní například všude tam, kde rychlost růstu nebo poklesu veličiny souvisí s její velikostí. Například rychlost s jakou se mění teplota horké kávy je funkcí teploty samotné. Rychlost tepelné výměny mezi dvěma tělesy je totiž úměrná rozdílu jejich teplot (Newtonův zákon). Takto se přirozeně diferenciální rovnice objevují v modelech mnoha dějů a jevů. Podstatu děje, který modelujeme, musí dodat fyzika, biologie nebo jiná aplikovaná věda. To v matematice obsaženo není. Matematika poté poslouží k analýze, jaké jsou pozorovatelné důsledky a tím se ověří, jestli příslušná aplikovaná věda správně vystihuje podstatu modelovaného děje.
Definice (Diferenciální rovnice)
Obyčejnou diferenciální rovnicí prvního řádu rozřešenou vzhledem k derivaci (stručněji též diferenciální rovnicí, DR) s neznámou \(x\) rozumíme rovnici tvaru
kde \(\varphi\) je funkce dvou proměnných.
Další formy zápisu rovnice (3.1) jsou následující.
Diferenciální rovnice bývá v aplikacích matematickým modelem kvantifikujícím scénář vývoje systému. Řešením jsou všechny možnosti, jak se tento systém může vyvíjet. K jednoznačnému předpovězení budoucího stavu je ovšem nutno znát také stav počáteční, který ze všech teoreticky možných průběhů vybere průběh odpovídající modelované situaci. Tento stav vyjadřuje počáteční podmínka, uvedená v následující definici.
Definice (Počáteční podmínka, Cauchyova úloha)
Nechť \(t_0\), \(x_0\) jsou reálná čísla. Úloha najít řešení rovnice (3.1), které splňuje zadanou počáteční podmínku
se nazývá počáteční (též Cauchyova) úloha.
Řešení Cauchyovy úlohy nazýváme též partikulárním řešením rovnice. Graf libovolného partikulárního řešení se nazývá integrální křivka.
Příklad (praktická interpretace řešení počáteční úlohy).
Pokud diferenciální rovnice udává rychlost ochlazování horkého nápoje a počáteční podmínka teplotu na počátku, je řešením počáteční úlohy funkce, do které dosadíme čas a přímo dostáváme teplotu nápoje v daném čase.
Pokud diferenciální rovnice udává rychlost růstu populace živočišného druhu v čase a počáteční podmínka velikost populace na počátku sledování, je řešením počáteční úlohy funkce, do které dosadíme čas a přímo dostáváme velikost populace v daném čase.
3.2. Existence a jednoznačnost řešení#
Jedna diferenciální rovnice má nekonečně mnoho řešení. Zpravidla je dokážeme zapsat pomocí jediného vzorce, který obsahuje nějakou (alespoň do jisté míry libovolnou) konstantu \(C\). Takový vzorec se nazývá obecné řešení rovnice. Pokud není zadána počáteční podmínka a mluvíme o partikulárním řešení, máme tím na mysli jednu libovolnou funkci splňující diferenciální rovnici.
Pokud se proto bavíme o jednoznačnosti, máme tím na mysli jednoznačnost řešení počáteční úlohy.
Věta (Existence a jednoznačnost řešení Cauchyovy úlohy)
Počáteční úloha
Vlastnost z předchozí věty se nazývá Lipschitzovská spojitost. Počáteční úloha má tedy právě jedno řešení, jestliže je funkce v okolí počáteční podmínky Lipschitzovsky spojitá vzhledem ke druhé proměnné. (Picardova–Lindelöfova věta). Věta dokonce umožňuje i najít interval, na kterém je jednoznačnost garantována, viz [11].
3.3. Směrové pole#
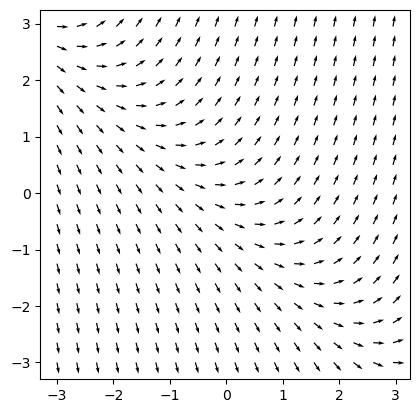
Derivace funkce v daném bodě udává rychlost růstu této funkce. Geometricky se jedná o směrnici tečny. Díky tomu lze rovnici
Počáteční podmínka \(x(t_0)=x_0\) geometricky vyjadřuje skutečnost, že graf příslušného řešení prochází v rovině bodem \([t_0,x_0]\). Má-li tato počáteční úloha jediné řešení, neprochází bodem \([t_0,x_0]\) žádná další křivka. Má-li každá počáteční úloha (3.1)-(3.2) jediné řešení (což bude pro nás velice častý případ), znamená to, že integrální křivky se nikde neprotínají.
Následující obrázek obsahuje směrové pole rovnice
Show code cell source
fig, ax = plt.subplots()
t,x = np.meshgrid(np.arange(-3,3,.35),np.arange(-3,3,.35)) # rastr pro kreslení obrázku
u = 1
v = x+t # pravá strana DR
n = np.sqrt(u**2+v**2)
u2, v2 = u/n, v/n # stejná délka pro každou šipku
plt.quiver(t,x,u2,v2,angles="xy")
ax.set_aspect(1) # stejné měřítko na obou osách
3.4. Analytické a numerické řešení#
Při studiu modelu založeného na diferenciální rovnici bývá často výhodné mít k dispozici vzorec, vyjadřující všechny funkce vyhovující rovnici nebo funkci vyhovující rovnici i počáteční podmínce. Takové řešení se nazývá analytické řešení. Například analytickým řešením počáteční úlohy
Nalezení analytického řešení však někdy bývá spojeno s nemalými obtížemi, někdy dokonce s obtížemi principiálně nepřekonatelnými. V takovém případě je možno rovnici vyřešit numericky a najít hodnoty řešení v určitých předem zvolených bodech. Protože diferenciální rovnice jsou základní technikou při modelování přírodních a fyzikálních jevů, jsou k dispozici robustní a časem prověřené techniky a algoritmy, které bývají jako knihovny zařazeny do běžných programů umožňujících práci s těmito rovnicemi.
Výhodou numerického přístupu je, že namísto funkčního předpisu máme řadu numerických hodnot a s čísly se zpravidla pracuje pohodlněji než s funkcemi. Dokonce nejčastější metoda jak získat přehled o chování funkce dané funkčním předpisem spočívá v nakreslení grafu, což v podstatě odpovídá převedení na čísla a znázornění těchto čísel v souřadné soustavě. Na druhou stranu, převedení na čísla může býti nevýhodou. Například nejsme schopni postihnout závislost na parametrech. Numerické simulace se dají dělat pro konkrétní hodnoty parametrů a není možné v nich podchytit závislost na parametrech jinak, než řešit rovnici opakovaně pro různé parametry a porovnávat vzniklá řešení.
I v případech, kdy je možné najít analytické řešení, může však být numerické řešení užitečnější. Analytická řešení mohou být tak složitá, že z nich není ani po bližším prozkoumání jasné, jak se systém chová. Proto se nejprve zaměříme na numerické řešení.
3.5. Model ostrovní biogeografie#
Životní prostředí podléhá neustálým změnám, ať už vlivem činnosti člověka či vlivem jiných aspektů. V důsledku toho jsou některé živočišné či rostlinné druhy ohroženy, jiné vymírají a jiné se naopak začínají více a více prosazovat. K pochopení tohoto procesu může pomoci i ostrovní ekologie - studium vývoje druhů na ostrovech. Z hlediska pevniny jsou totiž ostrovy relativně nestálá a neustále se vyvíjející společenstva, vysoce citlivá na vnější zásahy, na kterých je možno sledovat vývoj jednotlivých druhů – jejich stability, rozmanitosti a pod. Principy ostrovní ekologie se nevztahují pouze na ostrovy v zeměpisném slova smyslu. Jde o jakýkoliv habitat oddělený od okolí. Například vrcholky hor jsou ostrovy v moři stanovišť s menší nadmořskou výškou, parky jsou ostrovy zeleně v moři městské zástavby, lesy jsou ostrovy v zemědělsky využívané krajině, živočichové jsou ostrovy pro parazity na nich žijící a podobně. Ostrovní ekologie je tedy nedílnou součástí ekologie jako celku i u vnitrozemských států.
R. H. Mac Arthur a E. O. Wilson představili v 60. letech 20. stol. následující teorii dynamické rovnováhy počtu druhů na ostrově. Tato teorie získala veliký ohlas a oba vědce proslavila mezi ekology, protože vysvětlovala fenomény spojené s dynamikou populací na ostrovech, jako souvislost druhové rozmanitosti se vzdáleností a rozlohou ostrova. Vzhledem k možnostem aplikací teorie i na „ostrovy“ v přeneseném smyslu tohoto slova se teorie Mac Arthura a Wilsona stala základním stavebním kamenem moderní krajinné ekologie (viz [12]).
Uvažujme ostrov, nacházející se relativně nedaleko pevniny – takový, že na něj mohou z pevniny migrovat nové druhy (větrem, přes moře, v trusu ptáků a pod.), které na ostrově dosud nežijí. Tyto druhy se na ostrově buď uchytí nebo neuchytí. V případě, že se druh úspěšně uchytí a kolonizuje ostrov, může tato kolonizace být na úkor druhů jiných, které následkem tohoto vymřou. Protože pevnina má mnohem větší nosnou kapacitu než ostrov, slouží jako jistá zásobárna nových druhů pro uvažovaný ostrov a ostrov je tedy neustále pod vlivem imigrace. Protože ostrov má menší nosnou kapacitu, než mnohem rozlehlejší a bohatší pevnina, může na něm trvale žít méně druhů než na pevnině.
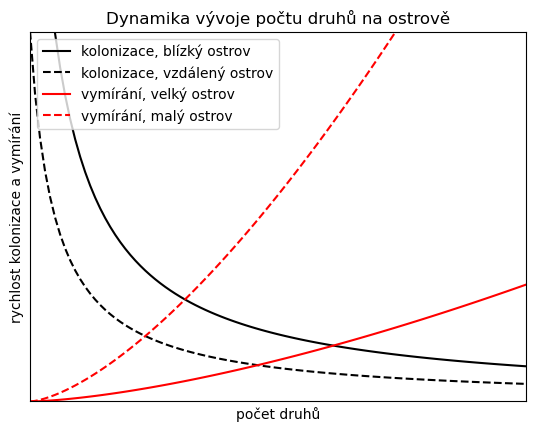
Předpokládejme, že rychlost kolonizace, tj. počet druhů, které v čase \(t\) proniknou na ostrov a úspěšně se zde zabydlí, roste s počtem imigrantů a klesá s počtem druhů, které na ostrově již žijí. První předpoklad je zcela přirozený, druhý vyjadřuje v ekologii obvyklé tvrzení, že komplexnější společenstva organismů jsou stabilnější a lépe odolávají invazi nových druhů. Počet imigrantů klesá s rostoucí vzdáleností ostrova od pevniny, což je opět přirozený předpoklad. Uvedené předpoklady splňuje funkce
Předpokládejme, že rychlost vymírání druhů, které v minulosti již úspěšně kolonizovaly ostrov, ale neobstály v konkurenci pozdějších kolonizátorů, roste s klesající rozlohou ostrova a s rostoucím počtem druhů na ostrově. Tento předpoklad je opět přirozený, vzhledem k tomu, že ostrov menší rozlohy má menší nosnou kapacitu. Kromě toho, byl tento předpoklad prověřen i pokusy (viz [3]). Rychlost vymírání druhů je možné modelovat funkcí
Show code cell source
def kolonizace(N,b=1,beta=1,D=1):
return b/(D*(N+beta))
def vymirani (N, S=1, a=1, k=1.4):
return a*N**(k)/S
N = np.linspace(0,10,100)
plt.plot(N,kolonizace(N,b=10, D=1, beta=.5),"k-",label="kolonizace, blízký ostrov")
plt.plot(N,kolonizace(N,b=10, D=2, beta=.5),"k--",label="kolonizace, vzdálený ostrov")
plt.plot(N,vymirani(N, k=1.5, S = 10),"r-",label=r"vymírání, velký ostrov")
plt.plot(N,vymirani(N, k=1.5, S = 2),"r--",label=r"vymírání, malý ostrov")
plt.legend()
ax = plt.gca()
ax.set(
ylim=(0,10),
xlim=(0,10),
title="Dynamika vývoje počtu druhů na ostrově",
xlabel="počet druhů",
ylabel="rychlost kolonizace a vymírání",
xticks=[],
yticks=[]
);
Nyní budeme pohlížet na rychlost s jakou se mění počet druhů na ostrově ze dvou hledisek a tato hlediska nám pomůžou sestavit matematický model pro popis dynamiky ostrova.
Rychlost s jakou se mění počet druhů na ostrově je derivace počtu druhů podle času. To je přímo význam derivace podle času.
\[ \frac{\mathrm dN}{\mathrm dt} \]Rychlost s jakou se mění počet druhů na ostrově je také změna počtu druhů za jednotku času. Tato změna se vypočítá jako rozdíl počtu druhů, které ostrov za jednotku času kolonizovaly a počtu druhů, které na ostrově za tuto dobu vymřely. Tedy půjde o rozdíl rychlosti kolonizace a rychlosti vymírání.
\[ \frac b{D(N+\beta)}-a\frac {N^k}S. \]
V předchozích bodech jsme dvakrát z různých pohledů představili stejnou veličinu a proto se oba výrazy musí rovnat. Počet druhů na ostrově rozlohy \(S\) ve vzdálenosti \(D\) od pevniny tedy vyhovuje diferenciální rovnici
Řešení rovnice pro jistou sadu parametrů je na následujícím obrázku.
Show code cell source
pocatecni_podminka = [0]
meze = [0,25]
t = np.linspace(*meze, 100) # časy ve kterých určíme hodnotu řešení
def rovnice(t, N, a=1, b=8, beta=0.2, D=0.5, k=1.3, S=20):
return b/(D*(N+beta)) - a*N**k/S
reseni = solve_ivp(rovnice,
meze,
pocatecni_podminka,
t_eval=t,
)
plt.plot(reseni.t, reseni.y.T)
ax = plt.gca()
ax.set(
xlabel="čas",
ylabel="počet druhů",
title="Dynamika počtu druhů na ostrově"
)
ax.grid();
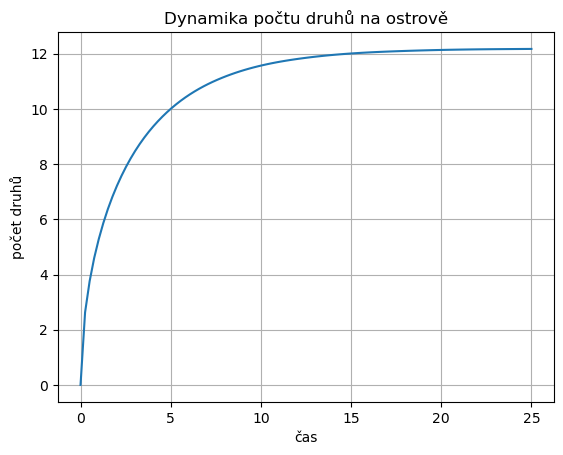
Všimněme si, že počet druhů ustálí na konstantní hodnotě. To znamená, že nepřevládá ani vymírání druhů ani kolonizace, ale oba procesy jsou v rovnováze. Tato rovnováha je dynamická. Není nijak garantováno, že druhové složení je neměnné. V praxi dojde k tomu, že druhové bohatství (počet druhů) bude konstantní, bude se však měnit složení druhů.
Východiska Mac Arthurovy a Wilsonovy teorie byla potvrzena pokusem s ostrůvky poblíž Floridy. Ostrůvky byly zbaveny chemickou cestou bezobratlých živočichů. Za necelý rok se druhové bohatství díky invazi z pevniny obnovilo. Konkrétní druhové složení však bylo jiné, než před zásahem, a toto druhové složení se neustále měnilo. Ostrůvky poblíž pobřeží hostily více druhů než ty vzdálenější a při dodatečném umělém snížení velikosti některých ostrůvků se jejich druhové bohatství zmenšilo. [10]
V roce 1883 byl opakovanými sopečnými výbuchy téměř zničen život na ostrově u sopky Krakatoa, který leží cca \(25\mathrm {km}\) od Jávy a má rozlohu \(20\,\mathrm{km}^2\). Již v roce 1921 byl tento ostrov osídlen 27 druhy ptáků. Tento počet se v pozdějších letech již neměnil, měnila se pouze druhová skladba. Vzhledem k tomu, že ptáci snadno pronikají na ostrov, se poměrně rychle obnovila jejich rovnováha. Hodnoty koeficientů v tomto případě jsou \(\frac{b}{D}=22\,\text{rok}^{-1}\), \(\beta=1\) a \(\frac aS=0.03\,\text{rok}^{-1}\). Rostlin bylo na tomto ostrově v roce 1934 celkem 271 druhů, tento počet však nadále rostl. Poněkud paradoxně může jevit fakt, že jako první se na ostrově úspěšně uchytili mrchožraví živočichové. Tento jev je však přirozený, uvědomíme-li si, že tito živočichové měli nejhojnější zdroje potravy v podobě mršin živočichů neúspěšně invadujících druhů. [10]
Základy ostrovní ekologie nacházejí jisté uplatnění i při zakládání a udržování rezervací, za účelem zachování druhové pestrosti. Protože, jak ukazuje ostrovní ekologie, omezené kapacity ostrova a nízká migrace způsobí, že přežívá pouze omezený počet druhů, je nutno „ostrovním efektům“ co nejvíce zabránit. To lze činit například zakládáním rezervací o velké rozloze. Dále je vhodné, aby v rezervaci byl velký počet ekologických nik a remízků, kde se jednotlivé druhy mohou uchytit (zvětší se \(b\) a zmenší \(a\)). Je-li nutno založit rezervaci o malé rozloze, je nutno ji podrobit velice přísnému režimu ochrany a je vhodné mít systém rezervací, které jsou propojeny migračními cestami.
3.6. Transformace diferenciálních rovnic#
Naučíme se vyjadřovat rovnice s derivacemi v jiných proměnných tak, aby bylo možné snížit počet parametrů v této rovnici. Pro jednoduchost budeme uvažovat jenom případ, kdy nová proměnná je lineární funkcí původní proměnné.
Uvažujme funkci \(y\) proměnné \(x\). Připomeneme si vzorce pro derivaci součtu, derivaci konstantního násobku a derivaci složené funkce, ale uvedeme si je v kontextu vhodném pro studium diferenciálních rovnic.
Z derivace součtu a z derivace konstanty plyne pro funkci \(y\) a konstantu \(y_0\) vztah
\[ \frac{\mathrm d (x\pm x_0)}{\mathrm dt} = \frac{\mathrm d x}{\mathrm dt} \pm \frac{\mathrm d x_0}{\mathrm dt} = \frac{\mathrm d x}{\mathrm dt} \pm 0= \frac{\mathrm d x}{\mathrm dt}.\]Z derivace konstantního násobku funkce plyne pro funkci \(y\) a konstantu \(k\) vztah
\[ \frac{\mathrm d (kx)}{\mathrm dt} = k\frac{\mathrm d x}{\mathrm dt}.\]Z derivace složené funkce plyne pro konstantu \(k\) a veličinu \(T = kt\) vztah
\[ \frac{\mathrm d x}{\mathrm d t} = \frac{\mathrm d x}{\mathrm dT} \frac{\mathrm d T}{\mathrm dt} = \frac{\mathrm d x}{\mathrm d T} k \]tj.\[ \frac{\mathrm d x}{\mathrm d (kt)} = \frac{\mathrm d x}{\mathrm d T} = \frac 1k \frac{\mathrm d x}{\mathrm d t}.\]
Výše uvedené výpočty je možno shrnout do pravidla v následující poznámce.
Poznámka (Transformace diferenciální rovnice do jiných jednotek)
Pro \(X=k_1(x-x_0)\) a \(T=k_2 t\) platí
Navíc vzorec z poznámky silně připomíná klasické počítání se zlomky. Proto máme Leibnizův tvar zápisu derivací \(\frac{\mathrm dX}{\mathrm dT}\) při studiu diferenciálních rovnic více v oblibě, než zápis Lagrangeův, \(x'\).
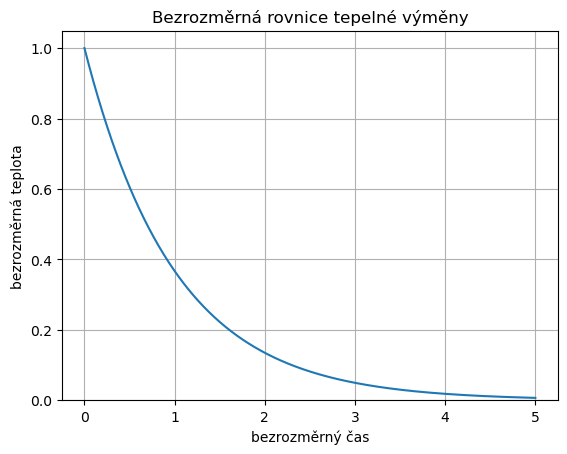
Příklad (Bezrozměrná rovnice tepelné výměny)
Model tepelné výměny
Poznámka (Nondimenzionalizace, rozměrová analýza)
Proces eliminace parametrů z modelu popsaného diferenciální rovnicí se nazývá nondimenzionalizace nebo rozměrová analýza modelu, protože eliminaci parametrů je vhodné provádět tak, aby výsledné nové veličiny vycházely bez fyzikálních jednotek. K tomu se provádí rozbor jednotek jednotlivých veličin. V jednoduchých případech však stačí primitivní postup popsaný v odstavcích výše a ukázaný na příkladu. V tomto příkladě veličina \(x\) nemá fyzikální jednotku, protože je součinem konstanty \(k\) (s jednotkou \(\mathrm s^{-1}\)) a času \(t\) (s jednotkou \(\mathrm s\)). Je možné ji považovat za bezrozměrný čas. Veličina \(y\) také nemá fyzikální jednotku, protože je podílem dvou teplot a je možné ji považovat za bezrozměrnou teplotu.
V úloze s ochlazováním tělesa bylo zavedení nových veličin přirozené. I u méně zřejmých úloh zkušenosti ukazují, že je vhodné volit transformaci tak, aby vznikly veličiny bezrozměrné, které nemají fyzikální jednotku.
Poznámka (Výhody transformace do bezrozměrných veličin.)
Obecné výhody transformace diferenciálních rovnic jsou následující.
Po transformaci obsahuje rovnice v nových veličinách menší množství parametrů.
Nové veličiny jsou bez fyzikální jednotky a tudíž vhodné pro numerické simulace, kdy se zpravidla o jednotky nestaráme.
Nové veličiny zpravidla nabývají hodnot řádově srovnatelných s jedničkou. Nejedná se ani o tisíce ani o tisíciny.
Všechny tři uvedené skutečnosti vedou k tomu, že s transformovanými rovnicemi se lépe pracuje v numerických modelech.
Show code cell source
N = 1000
t = np.linspace(0,5,N)
dt = t[1]-t[0]
T = np.zeros(N)
T[0] = 1
for i in range(1,N):
T[i] = T[i-1] - dt*T[i-1]
plt.plot(t,T)
plt.gca().set(
xlabel="bezrozměrný čas",
ylabel="bezrozměrná teplota",
title="Bezrozměrná rovnice tepelné výměny",
ylim=(0,None)
)
plt.grid();
Příklad (Bezrozměrná rovnice dynamické rovnováhy)
Rovnici