6. Diferenciální rovnice#
V této přednášce se seznámíme s diferenciálními rovnicemi. To není nic jiného, než správný název pro to, čemu jsme dříve říkali matematické modely formulované pomocí derivace. Viděli jsme, že tyto modely jsou v některých případech přirozeným matematickým aparátem pro popis reálně probíhajících dějů v přírodě. V přednášce se seznámíme se základním názvoslovím spojeným s touto problematikou, seznámíme se s metodami identifikace některých kvalitativních vlastností a u rovnic se separovanými proměnnými se naučíme hledat i analytické řešení. Protože se často setkáváme s modely nezávislými na čase, budeme se problematice těchto modelů věnovat podrobněji. Tyto modely mají tu vlastnost, že se ohraničená řešení po čase ustálí okolo stabilní hodnoty. Naučíme se hledat hodnoty odpovídající ustáleným řešením a z nich vybrat ty stabilní, k nimž systém může konvergovat, nebo nestabilní, které oddělují oblasti, ze kterých systém dospívá k jednotlivým stabilním stavům.
Volitelný obsah 6.1 (Motivace, přehled úspěchů)
Diferenciální rovnice jsou jakýmsi zlatým grálem modelování. V historii byly matematické modely založené na těchto rovnicích přímou motivací k rozvoji diferenicálního počtu (aby bylo možno tyto rovnice formulovat) a integrálního počtu (aby bylo možno tyto rovnice řešit). Od té doby dosáhla trojice derivace+integrál+diferenciální rovnice na obrovskou řadu úspěchů napříč mnoha obory.
Obr. 6.1 Planeta Neptun. Její existence byla matematicky předpovězena na základě jinak nevysvětlitelných poruch v dráze planety Uran. Ještě týž den byl Neptun nalezen na obloze a následující den bylo potvrzeno, že se jedná o planetu. www.publicdomainpictures.net#

Obr. 6.2 Analogové počítače využívaly toho, že různé děje mohou být popisovány stejnými diferenciálními rovnicemi. V SSSR se používaly do 80-tých let vzhledem k nedostatku polovodičů a politické definici kybernetiky jako buržoazní pavědy. https://un-sci.com/ru/2020/01/10/vodyanoj-kompyuter-gidrointegrator-lukyanova/#
Odvození Keplerových zákonů pohybu planet matematickou cestou a tím potvrzení gravitačního zákona (Newton).
Matematický aparát pro statické výpočty a výpočty nosníků (Euler, Bernoulli, Timoshenko).
Objev planety Neptun předpovězením existence této planety na základě jinak nevysvětlitelných poruch v dráze planety Uran (Verrier).
Teorie rovnováhy populací na ostrovech (MacArthur, Wilson).
Teorie epidemií (Kermack, McKendrick).
Chemické oscilátory (Prigogine), Nobelova cena za nerovnovážnou termodynamiku.
Modely konkurence živočišných druhů, princip konkurenčního vyloučení (Gause).
Modely predace živočišných druhů, oscilace v systému dravce a kořisti (Lotka, Volterra, Holling).
Vysvětlení podstaty periodického přemnožování Choristoneura fumiferana v kanadských lesích (Ludwig, Jones, Holling).
Systémová biologie, výzkum složitých interakcí mezi enzymy, geny a proteiny v živých organismech (Alon).
Výzkum meteoritů s rodokmenem (Zdeněk Ceplecha, Pavel Spurný), výpočet jejich místa dopadu a místa, odkud meteorit přiletěl. Nesmírně cenný zdroj studijního materiálu.
Zaměřovače pro řízení protiletecké obrany (Antonín Svoboda, český kybernetik). Svoboda později konstruoval výkonnější zaměřovače, získal prestižní vyznamenání námořnictva USA, jeho práce pomohla rozhodnout válku v tichomoří.
Někdy je nutné znát řešení rovnice, někdy stačí znát rovnici řídící studovaný proces a i bez znalosti řešení je možné získat užitečné informace.
Chování řešení při změně rozměrů systému. Využívá se například v aerodynamických tunelech, kdy se rozměrné objekty testují na zmenšeninách. Dále se využívá tam, kde rovnici nedokážeme vyřešit, například model sesuvu hory do přehrady a následná tsunami v údolí Vajont nebo akustika v Janáčkově hudební síni.
Náhrada jednoho problému jiným, který se chová stejně, ale je možné jej modelovat. Zahrnuje sestavování mechanických počítačů (zaměřovače prof. Svobody) nebo vodních počítačů (Moniac sestavený v roce 1949 pro model ekonomiky Nového Zélandu, vodní integrátor používaný Ruskem do 80-tých let)
6.1. Obyčejná diferenciální rovnice prvního řádu#
Obyčejná diferenciální rovnice je rovnice, kde vystupuje neznámá funkce a její derivace. Setkáváme se s ní například všude tam, kde rychlost růstu nebo poklesu veličiny souvisí s její velikostí. Například rychlost s jakou se mění teplota horkého tělesa je funkcí teploty samotné. Rychlost tepelné výměny mezi dvěma tělesy je totiž úměrná rozdílu jejich teplot (Newtonův zákon). Takto se přirozeně diferenciální rovnice objevují v modelech nejrůznějších dějů jevů. Podstatu děje, který modelujeme, musí dodat fyzika, biologie nebo jiná aplikovaná věda. To v matematice obsaženo není. Matematika poté poslouží k analýze, jaké jsou pozorovatelné důsledky a tím se ověří, jestli příslušná aplikovaná věda správně vystihuje podstatu modelovaného děje.
Definice (Diferenciální rovnice)
Obyčejnou diferenciální rovnicí prvního řádu rozřešenou vzhledem k derivaci (stručněji též diferenciální rovnicí, DR) s neznámou \(\displaystyle y\) rozumíme rovnici tvaru
kde \(\displaystyle \varphi\) je funkce dvou proměnných.
(anglicky ordinary differential equation, ODE)
Další formy zápisu rovnice (6.1) jsou
Příklad. Najděte všechny funkce splňující \(\displaystyle y'=2xy\). (Naučíme se řešit později.)
Diferenciální rovnice bývá v aplikacích matematickým modelem kvantifikujícím scénář vývoje systému. Řešením jsou všechny možnosti, jak se tento systém může vyvjíjet. K jednoznačnému předpovězení budoucího stavu je ovšem nutno znát také stav počáteční, který ze všech teoreticky možných průběhů vybere průběh odpovídající modelované situaci. Tento stav vyjadřuje počáteční podmínka, uvedená v následující definici.
Definice (Počáteční podmínka, Cauchyova úloha)
Nechť \(\displaystyle x_0\), \(\displaystyle y_0\) jsou reálná čísla. Úloha najít řešení rovnice (6.1)
se nazývá počáteční (též Cauchyova) úloha.
Řešení Cauchyovy úlohy nazýváme též partikulárním řešením rovnice. Graf libovolného partikulárního řešení se nazývá integrální křivka.
(anglicky initial condition, IC, initial value problem, IVP)
Příklad (praktická interpretace řešení počáteční úlohy).
Pokud diferenciální rovnice udává rychlost ochlazování horkého nápoje a počáteční podmínka teplotu na počátku, je řešením počáteční úlohy funkce, do které dosadíme čas a přímo dostáváme teplotu nápoje v daném čase.
Pokud diferenciální rovnice udává rychlost růstu populace živočišného druhu v čase a počáteční podmínka velikost populace na počátku sledování, je řešením počáteční úlohy funkce, do které dosadíme čas a přímo dostáváme velikost populace v daném čase.
Pokud diferenciální rovnice udává rychlost nárůstu hladiny podzemní vody ve směru od čerpané studny a počáteční podmínka udává výšku hladiny ve studni, je řešením počáteční úlohy funkce udávající výšku hladiny podzemní vody jako funkci vzdálenosti od studny.
Příklad. Najděte všechny funkce splňující \(\displaystyle y'=2xy\) a \(\displaystyle y(0)=3\). (Naučíme se řešit později.)
Věta (Existence a jednoznačnost řešení Cauchyovy úlohy)
Má-li funkce \(\displaystyle \varphi (x,y)\) ohraničenou parciální derivaci \(\displaystyle \frac{\partial \varphi}{\partial y}\) v okolí počáteční podmínky, potom má počáteční úloha (6.1)-(6.2) právě jedno řešení definované v nějakém okolí počáteční podmínky.
Příklad. Rovnice
má řešení \(\displaystyle y=e^x\), což nahlédneme snadno, protože exponenciální funkce se nemění derivováním. Dosazením je možné ukázat, že má dokonce řešení
kde \(\displaystyle C\) je libovolné číslo.
Příklad. Řešení počáteční úlohy
6.1.1. Obecné a partikulární řešení#
Řešení diferenciální rovnice je nekonečně mnoho. Zpravidla je dokážeme zapsat pomocí jediného vzorce, který obsahuje nějakou (alespoň do jisté míry libovolnou) konstantu \(\displaystyle C\). Takový vzorec se nazývá obecné řešení rovnice. Pokud není zadána počáteční podmínka a mluvíme o partikulárním řešení, máme tím na mysli jednu libovolnou funkci splňující diferenciální rovnici.
Příklad: Obecným řešením diferenciální rovnice
Softwarové řešiče ODE (symbolicky):
6.2. Modely využívající diferenciální rovnice#
6.2.1. Tepelná výměna#

Obr. 6.3 Tepelná výměna probíhá intenzivněji při velkém rozdílu teplot, https://pixabay.com#
Z fyziky víme, že rychlost tepelné výměny mezi dvěma tělesy je úměrná rozdílu jejich teplot (Newtonův zákon).
Z přednášek o derivacích víme, že rychlost je matematicky derivace. Proces tepelné výměny probíhající podle Newtonova zákona je tedy možno modelovat diferenciální rovnicí
\[ \frac{\mathrm dT}{\mathrm dt}=-k(T-T_0). \]Rovnice udává, že teplota \(\displaystyle T\) horkého tělesa se mění (rychlost změny je derivace) tak, že klesá (znaménko minus) rychlostí úměrnou (konstanta \(\displaystyle k\)) teplotnímu rozdílu mezi teplotou tělesa a teplotou okolí \(\displaystyle T_0\) (člen \(\displaystyle T-T_0\)).
K rovnici v ideálním případě dodáváme materiálovou charakteristiku (konstantu úměrnosti \(\displaystyle k\)) a počáteční teplotu. Řešením rovnice je funkce udávající závislost teploty na čase. Chceme-li znát teplotu za určitý čas, není nutné provádět pokus a čekat na uplynutí požadované doby. Můžeme teplotu přímo vypočítat.
Jednotka konstanty úměrnosti \(\displaystyle k\) je rovna převrácené hodnotě času. Tato konstanta číselně vyjadřuje rychlost ochlazování horkého tělesa v okamžiku, kde je jednotkový rozdíl teplot. Podrobnější rozbor těchto tvrzení je uveden v úvodní přednášce o derivaci, kdy jsme se s danou rovnicí setkali poprvé.
Někdy může být vhodné nesledovat teplotu \(\displaystyle T\), ale rozdíl oproti okolní teplotě, \(\displaystyle \tau=T-T_0\). Rovnice se potom zjednoduší na
\[ \frac{\mathrm d\tau}{\mathrm dt}=-k\tau,\]tedy na rovnici, kdy rychlost změny je úměrná funkční hodnotě.
6.2.2. Datování pomocí uhlíku#

Obr. 6.4 Rovnice konstantního růstu nebo úbytku je základem datování pomocí uhlíku, https://www.flickr.com/photos/capturetheuncapturable, licence CC BY 2.0#
Při datování archeologických nálezů pozůstatků živých organismů se využívá fyzikálního poznatku, že radioaktivní prvky se rozpadají rychlostí, která je úměrná množství dosud nerozpadnutého materiálu.
Rychlost, s jakou se mění množství (a tedy i koncentrace \(\displaystyle y\) v daném vzorku) nerozpadnutého radioaktivního materiálu je tedy matematicky popsána rovnicí
\[\frac{\mathrm dy}{\mathrm dt}=-\lambda y,\]kde \(\displaystyle \lambda\) je konstanta úměrnosti. Tato rovnice je přirozeným důsledkem toho, že pro daný nestabilní izotop mají všechny atomy stejnou pravděpodobnost, že u nich dojde k rozpadu a tato pravděpodobnost se s časem nemění.Konstanta \(\displaystyle \lambda\) má jednotku rovnu převrácené hodnotě jednotky času a udává rychlost radioaktivního rozpadu pro jednotkové množství vzorku.
Měříme množství radioaktivního uhlíku \(\displaystyle ^{14}C\) vztažené k množství stabilního \(\displaystyle ^{12}C\). Počáteční podmínka je známa (předpokládáme stejný poměr zastoupení jako relativně nedávno, před průmyslovou revolucí) a díky tomu můžeme najít funkci udávající, jak s časem klesá zastoupení radioaktivního uhlíku. Obsah radioaktivního i stabilního uhlíku je možné změřit a tím získáme odhad, kolik procent radioaktivního uhlíku se rozpadlo. Řešení počáteční úlohy poté použijeme pro odhad doby, kdy organismus přestal spotřebovávat uhlík z atmosféry. Tím získáme odhad, před kolika lety došlo ke smrti studovaného objektu.
Při pokusu o datování kostí dinosaurů klesne množství radioaktivního uhlíku pod měřitelnou úroveň. Proto se v tomto případě používají látky s delším poločasem rozpadu.
6.2.3. Vývoj populace a její ekologický lov#

Obr. 6.5 Při intenzivním lovu může dojít ke zničení populace https://pixabay.com#
Zkoumejme velikost \(\displaystyle y\) určité populace, v prostředí s nosnou kapacitou \(\displaystyle K\).
Budeme pracovat s pojmem specifická míru růstu populace, což je rychlost růstu populace vztažená na jednotkové množství populace. Realistickým předpokladem dodaným biologickými vědami je, že v prostředí s omezenými úživnými vlastnostmi specifická míru růstu populace klesá s tím, jak se velikost populace přibližuje k nosné kapacitě, a specifická rychlost růstu populace je modelována funkcí \(\displaystyle r\left(1-\frac yK\right)\). Podle velkosti koeficientů v této rovnici dělíme živočichy na r-stratégy a K-stratégy a toto dělení odráží, jak se snaží druh vyrovnávat se změnami prostředí.
Za uvedených předpokladů je možno vývoj populace popsat rovnicí
\[\frac 1y \frac{\mathrm dy}{\mathrm dt}=r\left(1-\frac yK\right),\]tj.\[\frac{\mathrm dy}{\mathrm dt}=ry\left(1-\frac yK\right).\]Tato rovnice se nazývá logistická rovnice. Podle ní je rychlost růstu úměrná současně velikosti populace a volnému procentu životního prostředí.Pokud lovem snížíme přírůstky populace, můžeme tento proces modelovat rovnicí
\[\frac{\mathrm dy}{\mathrm dt}=ry\left(1-\frac yK\right)-h(y),\]kde \(\displaystyle h(y)\) je intenzita lovu populace o velikosti \(\displaystyle y\). Modelování tohoto procesu umožní nalezení ekonomicky výhodné ale přitom trvale udržitelné strategie lovu. Nejčatěji studované jsou případy konstantního lovu a lovu úměrného velikosti populace, tedy rovnice\[\frac{\mathrm dy}{\mathrm dt}=ry\left(1-\frac yK\right)-h\]a\[\frac{\mathrm dy}{\mathrm dt}=ry\left(1-\frac yK\right)-hy,\]kde \(\displaystyle h\) je konstanta.
6.2.4. Model ostrovní biogeografie#

Obr. 6.6 Závěry modelu ostrovní biogeografie byly verifikovány pomocí experimentů na mangrovových ostrůvcích u pobřeží Floridy. Experimenty zahrnovaly vliv vzdálenosti od pevniny, vliv velikosti (některé ostrůvky byly uměle zmenšeny) a sledování kolonizace (na některých ostrůvcích byl zničen život, aby mohly být opětovně kolonizovány). Obrázek z https://commons.wikimedia.org/wiki/File:Mangrove_plants_swamp_in_Florida.jpg#
Matematické modely je možné použít i pro studium ekosystémů. Následující model katapultoval jeho autory, Robert MacArthura a Edwarda Wilson mezi nejvýznamnější ekology. Slouží pro vysvětlení dynamické rovnováhy počtu druhů na ostrově, kdy se druhová skladba na ostrově mění, ale bohatost (počet druhů) zůstává. Původně byl odvozen pro skutečné ostrovy v moři, platí však pro jakýkoliv biotop odlišující se od okolí, například les v moři polí, vrcholky hor v moři krajiny s nižší nadmořskou výškou a podobně. Množství druhů, žijících na ostrově, označíme \(\displaystyle N\).
Na ostrov migrují nové druhy, které se mohou trvale usadit. Kromě toho, některé druhy, které kolonizovaly ostrov v minulosti, pod tlakem nových kolonizátorů vymírají. Rychlost změny počtu druhů na ostrově je dána jako rozdíl rychlosti kolonizace a vymírání druhů.
\[\frac{\mathrm dN}{\mathrm dt}=\text{kolonizace}-\text{vymírání}.\]Rozmanitější ekosystémy jsou stabilnější. Je-li na ostrově hodně druhů, je pro nové kolonizátory těžké se usadit. Proto je rychlost kolonizace klesající funkcí počtu druhů. Pro jednoduchost můžeme předpokládat, že rychlost kolonizace je nepřímo úměrná počtu druhů a tedy pro nějakou konstantu \(\displaystyle k_1\) platí
\[\text{kolonizace}=\frac{k_1}{N}.\]Je-li na ostrově více druhů, je pravděpodobnější, že některý vymře. Proto je rychlost mizení druhl z ostrova rostoucí funkcí počtu druhů. Pro jednoduchost můžeme předpokládat, že závislost je přímou úměrností, tj.
\[\text{vymírání}=k_2 N\]pro nějakou konstantu \(\displaystyle k_2\).
Model má potom tvar
6.2.5. Model aktivace kambia#
Kambium je pletivo, které se nachází mezi dřevem a lýkem u dřevin. Jeho aktivace vede k přírůstku tloušťky kmene. Aktivace kambia byla modelována pomocí diferenciální rovnice v článku Computational modeling of cambium activity provides a regulatory framework for simulating radial plant growth. V tomto modelu je vysvětlena dynamika pomocí enyzmu PXY a jeho aktivátoru CLE41. Tato aktivace probíhá podle schematu
Na rozdíl od předchozích příkladů se zde setkáváme s systémem tří vzájemně propojených diferenciálních rovnic. Takové systémy jsou běžné v modelování biologických dějů, kde dochází k vzájemným interakcím mezi několika látkami nebo druhy. Studují se podobnými metodami jako obyčejné diferenciální rovnice, ale jejich analýza je složitější. Zejména posouzení stability rovnovážných stavů není tak přímočaré jako u obyčejných diferenciálních rovnic.
Volitelný obsah 6.2 (Rovnice samočištění jezer)

Obr. 6.7 Jezero, ve kterém se přirozeně obměňuje znečištěná voda za čistou, se dokáže samo zotavit ze znečištění. Rychlost vyplavování nečistot je úměrná míře znečištění. https://pixabay.com#

Obr. 6.8 Při operaci ztrácí pacient krvinky rychlostí úměrnou koncentraci krvinek. Pokud je tato koncentrace malá, pacient ztratí krvinek málo. Zdroj: https://pixabay.com#
Nechť veličina \(\displaystyle y\) udává množství látky, která znečišťuje vodu v jezeře o objemu \(\displaystyle V\).
Předpokládejme, že do jezera přitéká čistá voda a stejnou rychlostí odtéká voda s nečistotami (hladina se nemění, je v ustáleném stavu). Nechť veličina \(\displaystyle r\) udává, jaký objem vody se v jezeře takto vymění za jeden den. Předpokládejme dále (poněkud nerealisticky), že rozdělení znečišťujících částic v jezeře je rovnoměrné.
Úbytek hmotnosti nečistot za časovou jednotku je dán derivací \(\displaystyle \frac{\mathrm dy}{\mathrm dt}\).
Protože koncentrace nečistot v jezeře a v odtékající vodě je \(\displaystyle \frac yV\), je úbytek znečištění možno vyjádřit též ve tvaru \(\displaystyle \frac rVy\). Podíl \(\displaystyle \frac rV\) je pro dané jezero kladná konstanta udávající, jak velká část z celkového množství vody se v jezeře vymění za časovou jednotku. Označíme-li tuto konstantu symbolem \(\displaystyle k\), je proces úbytku nečistot v jezeře popsán diferenciální rovnicí
\[ \frac{\mathrm dy}{\mathrm dt} =-ky. \]Výše uvedená rovnice na nazývá rovnice samočištění jezer, ale tento název je čistě formální. Jedná se vlastně o stejnou rovnici, která popisuje radioaktivní rozpad nebo změnu rozdílu mezi teplotou horkého nápoje a místnosti při chladnutí nápoje.
Stejnou rovnicí je možné popsat nejenom odbourávání nečistot z životního prostředí, ale i odbourávání léků nebo drog z těla. Považujme krevní oběh za jezero a lék nebo drogu za znečišťující látku. V případě, že rychlost odbourávání je úměrná koncentraci (platí pro farmakokinetiku prvního řádu, toto splňuje většina léčiv za běžných koncentrací), řídí se proces odbourávání stejnou diferenciální rovnicí.
Volitelný obsah 6.3 (RC obvod)
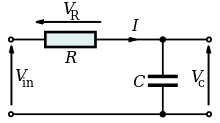
Obr. 6.9 RC obvod. Pro vysoké frekvence platí \(\displaystyle V_c\approx \frac{1}{RC}\int_0^t V_{in}\,\mathrm dt.\) Zdroj: Wikipedia#
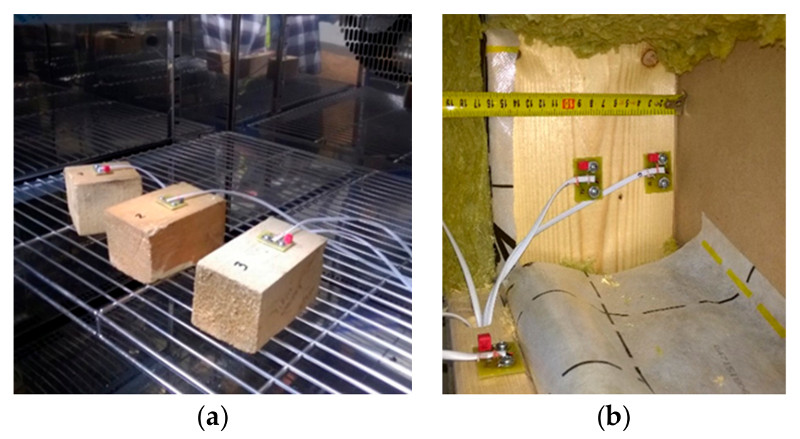
Obr. 6.10 Senzor pro sledování vlhkosti dřeva vyvinutý na ÚNOD LDF MENDELU a zabudovaný do dřevostavby. Zdroj: R. Slávik et. al., A Nondestructive Indirect Approach to Long-Term Wood Moisture Monitoring Based on Electrical Methods (2019)#
Při nabíjení kondenzátoru o kapacitě \(\displaystyle C\) přes odpor o velikosti \(\displaystyle R\) roste napětí na kondenzátoru, tím se mění nabíjecí proud a proto se mění i rychlost nabíení. Pomocí zákonů elektrotechniky je možno ukázat, že nabíjecí proud \(\displaystyle i\) kondenzátoru se řídí diferenciální rovnicí
Rovnice je tedy stejná jako rovnice radioaktivního rozpadu a rovnice samočištění jezer. Vhodnou manipulací s parametry součástek je možno měnit koeficient u této rovnice a vhodným spojováním těchto obvodů dokážeme podobně simulovat i složitější rovnice. To je bylo základem analogových počítačů, které nepracovaly s čísly, ale s napětími. Tyto počítače sehrály svou roli v době, kdy číslicové počítače byly nedostupné, pomalé a nespolehlivé. Tím byla historická úloha analogových počítačů splněna a již se nepoužívají.
RC obvod jako takový má však důležité místo i dnes. Dokáže například filtrovat signály podle frekvence. Výpočet jeho charakteristiky (tj. vyřešení rovnice) a sledování napětí na kondenzátoru umožní měření elektrického odporu tam, kde není vhodné odpor určovat z proudu a napětí pomocí Ohmova zákona. Typickým příkladem je odpor dřeva a jeho vodivost, tj. převrácená hodnota odporu. Tato veličina se používá k rychlému stanovení vlhkosti dřeva, nebo je možno ji dlouhodobě sledovat pomocí senzorů zabudovaných do dřevostavby.
Ve skutečnosti žádná elektronická součástka nemá ideální vlastnosti a proto se v obvodu projevují i nežádoucí parazitní charakteristiky. Pokud by toto bylo limitující, je možné obvod nahradit podobně se chovajícím zapojením s operačním zesilovačem (odkazovaná stránka pracuje s rovnicí v integrálním tvaru).
Volitelný obsah 6.4 (Lovci meteoritů z ČSSR a ČR)

Obr. 6.11 Tři dosud nalezené meteority Benešov. foto: Pavel Spurný, převzato z https://dvojka.rozhlas.cz/#
Česká republika je na světové špičce v oblasti propočítávání dráhy meteoritů ze světelné stopy zachycené sítí bolidových kamer. Vědcům z Astronomického ústavu se podařilo
jako prvním na světě najít pozůstatky meteoritu propočítáním jeho dráhy ze snímků zachycených speciálními kamerami a zpětně propočítat, odkud meteorit přiletěl (meteorit Příbram, 1959, první „meteorit s rodokmenem“, tj. s doloženým původem),
jako prvním na světě najít pozůstatky meteoritu 20 let po dopadu použitím analýz, které v době dopadu meteoritu nebyly k dispozici (meteorit Benešov, dopad 1991, nalezen 2011),
propočítat a najít (mimo jiné i na dně jezera!) zbytky meteoritu Čeljabinsk z roku 2013.
Meteority s vystopovaným původem jsou extrémně vzácné (do roku 2000 jenom 5 meteoritů, do roku 2016 pouze 31 meteoritů) a tým založený Zdeňkem Ceplechou a nyní vedený Pavlem Spurným se podílel na výpočtu drah většiny z nich. Použité metody jsou popsány například v článku Ceplecha, Revelle: Fragmentation model of meteoroid motion, mass loss, and radiation in the atmosphere, Meteoritics & Planetary Science 40, Nr 1, 35–54 (2005). Například ztráta rychlosti třením v atmosféře je modelována rovnicí
6.2.6. Akutní normovolemická hemodiluce#
Při chirurgické operaci dochází ke krvácení. Pacient ztrácí krev s ní i krvinky. Při konstantní intenzitě krvácení to znamená, že pacient ztrácí krvinky rychlostí úměrnou počtu krvinek. Formálně na krvinky v krvi můžeme pohlížet stejně jako na znečištění jezera. Jedná se o stejný proces vyplavování látek obsažených v tekutině, jenom měníme interpretaci veličin.
Pokud očekáváme takový průběh operace, že i po uvedeném poklesu bude pořád množství krvinek nad minimální přípustnou hodnotou, je možné před operací toto množství snížit tím, že se část krve odebere a krev se poté doplní vhodnými roztoky.
Protože pacient bude po výše uvedeném zákroku už od začátku operace menší počet krvinek, ztrácí tyto krvinky pomaleji a celkový úbytek během operace je menší. Na konci operace se pacientovi vrátí dříve odebraná krev. Výsledkem je, že po operaci v jeho těle koluje více krvinek, než pokud by byl operován s „původní krví“.
Aby metoda fungovala, je nutné odhadnout ztrátu krve během operace. Modelování pomocí diferenciálních rovnic dokáže předpovědět, kolik krve odebrat na začátku tak, aby i po plánované době operace zůstaly krevní hodnoty pacienta v bezpečných mezích. Pokud na začátku operace část krve dáme bokem a poté tekutiny doplňujeme fyziologickým roztokem (s tím, že vlastní krev vrátíme po skončení operace), jedná se o stejný proces a stejnou rovnici jako samočištění jezer. Pokud krev doplňujeme během operace z krve dopředu odebrané, dokážeme model samočištění jezer modifikovat pro daný proces.
Metoda akutní normovolemické hemodiluce nachází v současné praxi široké využití v řadě operačních oborů. Poskytuje totiž možnost vyhnout se podání alogenní krevní transfuze a tím eliminovat rizika z ní vyplývající. Současně je tato metoda výrazně finančně levnější a její přínos je tak i ekonomický. (Podle https://zdravi.euro.cz/)
6.3. Geometrická interpretace a transformace jednotek#
6.3.1. Geometrická interpretace ODE#
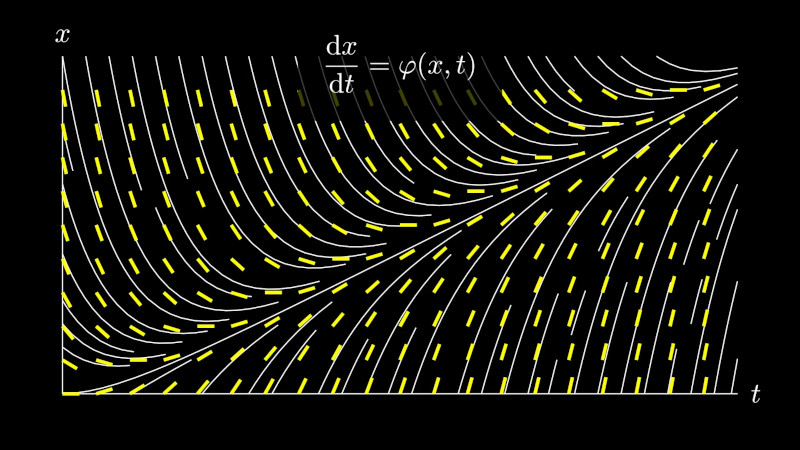
Protože derivace funkce v bodě udává směrnici tečny ke grafu funkce v tomto bodě, lze rovnici (6.1)
Počáteční podmínka \(\displaystyle y(x_0)=y_0\) geometricky vyjadřuje skutečnost, že graf příslušného řešení prochází v rovině bodem \(\displaystyle [x_0,y_0]\). Má-li tato počáteční úloha jediné řešení, neprochází bodem \(\displaystyle [x_0,y_0]\) žádná další křivka. Má-li každá počáteční úloha jediné řešení (což bude pro nás velice častý případ), znamená to, že integrální křivky se nikde neprotínají.
6.3.2. Transformace diferenciální rovnice#

Obr. 6.12 Letecký snímek údolí Vajont krátce po katastrofě. Video ukazuje, že při modelování procesu ve zmenšeném měřítku je nutné transformovat ostatní veličiny, například čas. Pro nás klíčová slova v čase 37:06 dokumentu jsou „tým techniků odhaduje nejvyšší možnou reálnou rychlost sesuvu půdy na jednu minutu, kterou pro simulaci přepočítají na čtyři sekundy“. Čas ve zmenšeném modelu ubíhá jinou rychlostí než čas v reálném ději. Foto: Wikipedia.#

Obr. 6.13 Model přehrady v údolí Vajont. Byl zdařilý, ale jeho použití s nesprávnými vstupními daty (podcenění odhadu rychlosti sesuvu hory) vedlo k tomu, že závěry nebyly relevantní. Vpravo tři postavy sledující pokus pomůžou s odhadem rozměrů. Zdroj: záběr z dokumentu Tsunami v horách a z filmu Vajont - šílenství mužů.#

Obr. 6.14 Model Janáčkovy koncertní síně pro Brno. Desetkrát menší a proto s desetkrát většími frekvencemi. Zdroj: Tomáš Kemr, Český rozhlas.#
Naučíme se vyjadřovat diferenciální rovnici v jiných proměnných tak, aby bylo možné snížit počet parametrů v této rovnici. Pro jednoduchost budeme uvažovat jenom případ, kdy nová proměnný je lineární funkcí původní proměnné.
Uvažujme funkci \(\displaystyle y\) proměnné \(\displaystyle x\). Připomeneme si vzorce pro derivaci součtu, derivaci konstantního násobku a derivaci složené funkce, ale uvedeme si je v kontextu vhodném pro studium diferenciálních rovnic.
Z derivace součtu a z derivace konstanty plyne pro funkci \(\displaystyle y\) a konstantu \(\displaystyle y_0\) vztah
\[ \frac{\mathrm d (y\pm y_0)}{\mathrm dx} = \frac{\mathrm d y}{\mathrm dx} \pm \frac{\mathrm d y_0}{\mathrm dx} = \frac{\mathrm d y}{\mathrm dx} \pm 0= \frac{\mathrm d y}{\mathrm dx}.\]Z derivace konstantního násobku funkce plyne pro funkci \(\displaystyle y\) a konstantu \(\displaystyle k\) vztah
\[ \frac{\mathrm d (ky)}{\mathrm dx} = k\frac{\mathrm d y}{\mathrm dx}.\]Z derivace složené funkce plyne pro konstantu \(\displaystyle k\) a veličinu \(\displaystyle X = kx\) vztah
\[ \frac{\mathrm d y}{\mathrm d x} = \frac{\mathrm d y}{\mathrm dX} \frac{\mathrm d X}{\mathrm dx} = \frac{\mathrm d y}{\mathrm d X} k \]tj.\[ \frac{\mathrm d y}{\mathrm d (kx)} = \frac{\mathrm d y}{\mathrm d X} = \frac 1k \frac{\mathrm d y}{\mathrm d x}.\]
Výše uvedené výpočty je možno shrnout do pravidla v následující poznámce.
Poznámka (Transformace diferenciální rovnice do jiných jednotek)
Pro \(\displaystyle Y=k_1(y-y_0)\) a \(\displaystyle X=k_2 x\) platí
Navíc vzorec z poznámky silně připomíná klasické počítání se zlomky. Proto máme Leibnizův tvar zápisu derivací \(\displaystyle \frac{\mathrm dy}{\mathrm dx}\) při studiu diferenciálních rovnic více v oblibě, než zápis Lagrangeův, \(\displaystyle y'\).
Příklad. Diferenciální rovnice tepelné výměny
obsahuje tři parametry: teplotu okolního prostředí \(\displaystyle T_\infty\), počáteční teplotu \(\displaystyle T_0\) a konstantu \(\displaystyle k\) související s fyzikálními vlastnostmi prostředí. Postupně můžeme posunout teplotní stupnici tak, aby teplota okolí byla nula a počáteční teplota jedna, tj. hodnotu \(\displaystyle T\) snížíme o \(\displaystyle T_\infty\) a upravíme dílek stupnice \(\displaystyle (T_0-T_\infty)\)-krát
Nová rovnice (6.6) neobsahuje žádné parametry a proto je pro studium jednodušší. Přesto je v ní obsažena veškerá informace obsažená v rovnici (6.6). Tuto informaci je však nutno interpretovat v kontextu definice nových proměnných. Například to, že všechna řešení rovnice (6.6) konvergují k nule znamená, že všechna řešení rovnice (6.5) konvergují k \(\displaystyle T_0\). To, že řešení rovnice (6.6) klesne na poloviční hodnotu za čas \(\displaystyle \ln 2\) znamená, že vzdálenost řešení rovnice (6.5) od rovnovážného stavu se na polovinu zmenší za čas \(\displaystyle \frac 1k \ln 2\).
Poznámka (Nondimenzionalizace, rozměrová analýza)
Proces eliminace parametrů z modelu popsaného diferenciální rovnicí se nazývá nondimenzionalizace nebo rozměrová analýza modelu, protože eliminaci parametrů je vhodné provádět tak, aby výsledné nové veličiny vycházely bez fyzikálních jednotek. K tomu se provádí rozbor jednotek jednotlivých veličin. V jednoduchých případech však stačí primitivní postup popsaný v odstavcích výše a ukázaný na příkladu. V tomto příkladě veličina \(\displaystyle x\) nemá fyzikální jednotku, protože je součinem konstanty \(\displaystyle k\) (s jednotkou \(\displaystyle \mathrm s^{-1}\)) a času \(\displaystyle t\) (s jednotkou \(\displaystyle \mathrm s\)). Je možné ji považovat za bezrozměrný čas. Veličina \(\displaystyle y\) také nemá fyzikální jednotku, protože je podílem dvou teplot a je možné ji považovat za bezrozměrnou teplotu.
V úloze s ochlazováním tělesa bylo zavedení nových veličin přirozené. I u méně zřejmých úloh zkušenosti ukazují, že je vhodné volit transformaci tak, aby vznikly veličiny bezrozměrné, které nemají fyzikální jednotku. Například v Horáček, Fyzikální a mechanické vlastnosti dřeva I je zavedena bezrozměrná vlhkost, bezrozměrný čas a bezrozměrná vzdálenost na straně 61 pro rovnici popisující difuzi a charakteristická délka, Biotovo číslo (bezrozměrná tepelná vodivost) a bezrozměrná teplota, bezrozměrný čas a bezrozměrná vzdálenost pro rovnici popisující vedení tepla na stranách 88 a 89.
Obecné výhody transformace diferenciálních rovnic jsou následující.
Po transformaci obsahuje rovnice v nových veličinách menší množství parametrů.
Nové veličiny jsou bez fyzikální jednotky a tudíž vhodné pro numerické simulace, kdy se zpravidla o jednotky nestaráme.
Nové veličiny zpravidla nabývají hodnot řádově srovnatelných s jedničkou. Nejedná se ani o tisíce ani o tisíciny.
Všechny tři uvedené skutečnosti vedou k tomu, že s transformovanými rovnicemi se lépe pracuje v numerických modelech.
Příklad. Diferenciální rovnici logistického růstu s lovem konstantní intenzity
6.4. ODE tvaru \(\displaystyle \frac{\mathrm dy}{\mathrm dx}=f(y)\), autonomní ODE#

Rovnice
se nazývá autonomní, nebo též nezávislá na čase. Je speciálním případem rovnice se separovanými proměnnými, která je uvedena na dalším slidu a naučíme se ji řešit analytickou cestou. Proto se nyní nebudeme zaměřovat na hledání obecného řešení, ale pokusíme se popsat chování řešení, aniž bychom tato řešení znali. Pokusíme se s co nejmenší námahou říct, jak se budou řešení chovat.
Je-li \(\displaystyle f(y_0)=0\), je konstantní funkce \(\displaystyle y(x)=y_0\) řešením rovnice (6.7). Protože derivace konstantní funkce je nula, vidíme, že řešením rovnice
\[f(y)=0\]obdržíme všechna konstantní řešení rovnice (6.7). Tato konstantní řešení se nazývají stacionární body.Stacionární body a jim odpovídající konstantní řešení představují rovnovážný stav. Často nás zajímá, jestli při vychýlení z tohoto rovnovážného stavu má systém tendenci se vrátit do původního stavu, nebo se od původního stavu dále odchylovat.
Pokud se při malém vychýlení z rovnovážného stavu systém do tohoto stavu vrací, mluvíme o stabilním stacionárním bodu.
Pokud se systém po malé výchylce do tohoto rovnovážného stavu nevrací, ale vyvíjí se k dalšímu stacionárnímu bodu nebo neohraničeně, mluvíme o nestabilním stacionárním bodu.
Následující věta umožní odlišit stabilní a nestabilní stacionární body. Protože v přírodě dochází k drobným perturbacím neustále, udává vlastně, které stacionární stavy jsou realizovatelné a můžeme je v přírodě pozorovat a které jsou prakticky nerealizovatelné.
Věta (Stabilita konstantních řešení)
Jestliže platí \(\displaystyle f(y_0)=0\), je konstantní funkce \(\displaystyle y(x)=y_0\) konstantním řešením rovnice
Pro grafickou intepretaci je vhodné připomenout, že funkce s kladnou derivací jsou rostoucí a funkce se zápornou derivací klesající. Pokud má tedy pravá strana derivaci různou od nuly, poznáme stabilitu z monotonie pravé strany.

Příklad. Logistická diferenciální rovnice s konstantním lovem \(\displaystyle h\), tj. rovnice
Poznámka (Autonomní rovnice s rozdílem na pravé straně)
Rovnice
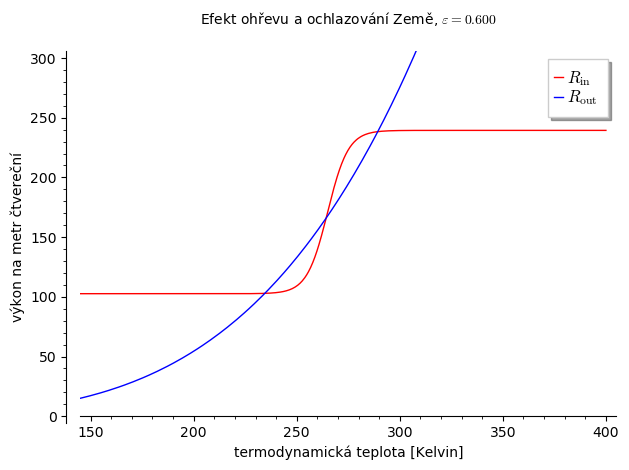
Obr. 6.15 Funkce z pravé strany rovnice pro teplotní bilanci Země#
Příklad. Teplotní bilanci Země je možno vyjádřit rovnicí
6.5. ODE tvaru \(\displaystyle \frac{\mathrm dy}{\mathrm dx}=f(x)g(y)\) (rovnice se separovanými proměnnými)#
Definice (ODE se separovanými proměnnými)
Diferenciální rovnice tvaru
kde \(\displaystyle f\) a \(\displaystyle g\) jsou funkce spojité na (nějakých) otevřených intervalech se nazývá obyčejná diferenciální rovnice se separovanými proměnnými.
Příklad: Rovnice
6.5.1. Řešení ODE se separovanými proměnnými#
Má-li algebraická rovnice \(\displaystyle g(y)=0\) řešení \(\displaystyle k_1\), \(\displaystyle k_2\), …, \(\displaystyle k_n\), jsou konstantní funkce \(\displaystyle y\equiv k_1\), \(\displaystyle y\equiv k_2\), …, \(\displaystyle y\equiv k_n\) řešeními rovnice.
Pracujme na intervalech, kde \(\displaystyle g(y)\neq 0\) a odseparujeme proměnné.
\[ \frac{\mathrm{d}y}{g(y)}=f(x)\mathrm{d}x\]Získanou rovnost integrujeme. Tím získáme obecné řešení v implicitním tvaru.
\[ \int \frac{\mathrm{d}y}{g(y)}=\int f(x)\mathrm{d}x+C\]Pokud je zadána počáteční podmínka, je možné ji na tomto místě dosadit do obecného řešení a určit hodnotu konstanty \(\displaystyle C\). Tuto hodnotu poté dosadíme zpět do obecného řešení a obdržíme řešení partikulární.
Pokud je to možné, převedeme řešení (obecné nebo partikulární) do explicitního tvaru (vyjádříme odsud \(\displaystyle y\)).
Poslední krok (převod do explicitního tvaru) je volitelný, zpravidla záleží na tom, co dalšího hodláme s řešením dělat. Pro většinu výpočtů je však explicitní tvar vhodnější než tvar implicitní a proto se o něj vždy snažíme.
Poznámka (Zápis partikulárního řešení pomocí určitého integrálu)
V případě počáteční podmínky \(\displaystyle y(x_0) = y_0\) je možné spojit třetí a čtvrtý krok a použít určitý integrál
Počáteční úloha má jediné řešení, pokud má pravá strana ohraničenou parciální derivace podle \(\displaystyle y\), jak je zmíněno v úvodu přednášky. Nicméně pro diferenciální rovnici se separovanými proměnnými je možné vyslovit následující mnohem jednodušší postačující podmínku pro jednoznačnost řešení.
Věta (existence a jednoznačnost řešení Cauchyovy úlohy pro rovnici se separovanými proměnnými)
Je-li \(\displaystyle g(y_0)\neq 0\), má počáteční úloha
Volitelný obsah 6.5 (Diferenciální rovnice růstu vodní kapky)
Příklad ukazuje, že i u modelů přírodních procesů může být více než jedno řešení. A že to není v rozporu s tím, jak chápeme fyziku a její kauzalitu.

Obr. 6.16 Londýnská mlha. Dnes už to není jako za časů Sherloka Holmese. Poslední velká mlha (Pea soup fog) byla v roce 1952. Zdroj: Wikipedia.#
Modelujme růst kulové kapky. Ta roste tak, že na povrchu kondenzují vodní páry. Kapka proto roste tak, že její objem se zvětšuje rychlostí úměrnou povrchu. Povrch je zase úměrný druhé mocnině poloměru a poloměr je úměrný třetí odmocnině objemu. Platí tedy (po sloučení všech konstant úměrnosti do jedné)
Tato rovnice má konstantní řešení \(\displaystyle V=0\). Nekonstantní řešení dostaneme po úpravě
Všimněte si, že počáteční úloha s počáteční podmínkou \(\displaystyle V(0)=0\) má konstantní nulové řešení
Volitelný obsah 6.6 (Diferenciální rovnice vyšších řádů)

Obr. 6.17 Téměř veškerá klasická mechanika a dynamika pohybů se redukuje na studium diferenciálních rovnic druhého řádu. Ve vesmíru i na Zemi. Zdroj: pixabay.com.#

Obr. 6.18 Příhradový nosník. Vzpěry jsou namáhány v ose. Teorii vybudoval v 18. století L. Euler, ale začala se dále rozvíjet a využívat až po sérii pádů příhradových železničních mostů v 19. století. Zdroj: www.ceskestavby.cz.#
Je-li \(\displaystyle x\) poloha tělesa, je derivace \(\displaystyle \frac{\mathrm dx}{\mathrm dt}\) rychlost a druhá derivace \(\displaystyle \frac{\mathrm d^2x}{\mathrm dt^2}\) zrychlení. Podle Newtonova pohybového zákona je součin hmotnosti a zrychlení roven výsledné působící síle. Tato síla může mít složku závislou na poloze (například síla, která vrací těleso do rovnovážné polohy), složku závislou na rychlosti (odporová síla prostředí) a složku nezávislou na poloze i rychlosti (například vnější síla). Proto je přirozené v podstatě jakýkoliv pohyb v mechanice modelovat pomocí diferenciální rovnice druhého řádu
Při studiu deformací nosníků nebo kmitů strun, ploch či těles se setkáme s diferenciálními rovnicemi typů
Poznámka Při odvození rovnice udávající deformaci zatíženého nosníku se vychází z rovnice
6.6. Diferenciální rovnice metodou konečných diferencí#
Z přednášek o derivaci máme aproximace derivací
Příklad (podle Autar Kaw et al.: Finite Difference Method for Ordinary Differential Equations.) Deformace \(\displaystyle y\) nosníku délky \(\displaystyle L\) podepřeného na koncích, vystaveného vertikálnímu zatížení \(\displaystyle q\) a axiálnímu namáhání \(\displaystyle T\) je dána rovnicí
Pro analogickou úlohu se vzpěrnou tlakovou pevností dřeva viz též A. Požgaj, Štruktúra a vlastnosti dreva str. 359.
6.7. Shrnutí, hlavní myšlenky#

Obr. 6.19 A jaká je hlavní message? Zdroj: pixabay.com#
Aplikované vědy (fyzika, biologie, nauka o materiálu, hydrologie) přirozeně formulují své zákony a poznatky mimo jiné i kvantitativně a pomocí pojmů vyjadřujících rychlosti změn. Při přepisu těchto zákonitostí do matematických modelů používáme derivaci jako rychlost růstu (případně záporně vzatou derivaci, jako rychlost poklesu).
Pokud známým způsobem souvisí změna veličiny popisující stav systému s velikostí této veličiny, je příslušným matematickým modelem diferenciální rovnice. S tímto jsme se setkali již mnohokrát ve cvičení během semestru.
Naučili jsme se základní diferenciální rovnice řešit analyticky, řekli jsme si, že se dají řešit numericky (v praxi využijeme předpřipravené procedury a proto se touto problematikou nemusíme zabývat do hloubky) a naučili jsme se i rovnice transformovat do jiných proměnných, které mohou být pro studium problému přínosnější, než původní veličiny.