8. Inverzní matice, determinanty#
Motivace.
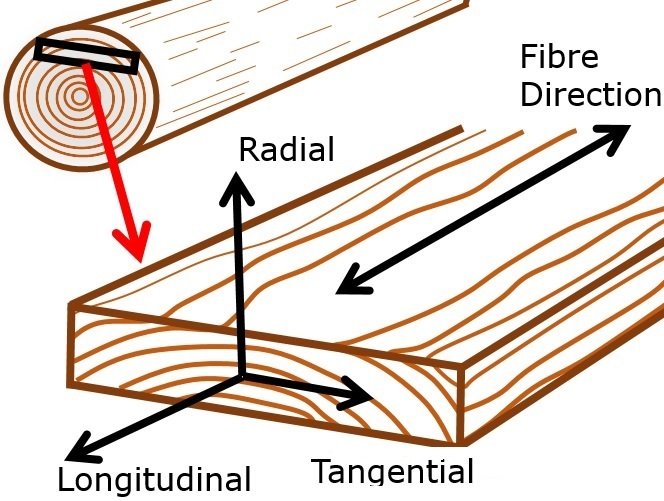
Chování libovolného systému nezávisí na souřadné soustavě, ve které tento systém popisujeme. Opravdu, dřevo neví, jak jsme si zvolili osy soustavy souřadnic. Ani, zda používáme pravoúhlou soustavu či jinou. Už vůbec dřevo nepozná, zda úlohu řešíme v pravotočivé či levotočivé soustavě souřadnic. Vhodná volba souřadné soustavy přirozeně neovlivní chování systému. Může ale značně usnadnit výpočty. Proto například při studiu obdélníkového objektu volíme osy ve směru hran. Proto například při studiu dřeva volíme souřadné osy v anatomických směrech dřeva. Tyto dva požadavky jsou částečně proti sobě v případě, že studujeme obdélníkový materiál s hranami jdoucími jiným směrem, než jsou anatomické směry dřeva. Naučíme se s tímto probléme vypořádat. Naučíme se používat matice k přechodu mezi souřadnými soustavami. Naučíme se transformovat fyzikální vlastnosti popsané maticemi z jedné soustavy do druhé.
Ukázali jsme si, že soustavu lineárních rovnic je možné zapsat pomocí maticového násobení ve tvaru \(\displaystyle AX=B\). Pokud by veličiny v této rovnici byla reálná čísla, řešitelnost je značně ovlivněna nulovostí či nenulovostí veličiny \(\displaystyle A\). Ukážeme si zobecnění této vlastnosti i pro matice a soustavy rovnic. K tomu si představíme nový pojem - determinant matice.
8.1. Inverzní matice#
U reálných čísel máme doplňkové operace ke sčítání a násobení. Jsou to odečítání a dělení. Odečítání matic můžeme implementovat jako sčítání matice s maticí vynásobenou minus jedničkou: \(\displaystyle A-B=A+(-B)\). Oproti tomu operace dělení matic vůbec není implementována. U reálných čísel lze dělení nahradit násobením převrácenou hodnotou: \(\displaystyle \frac {a}{b}=ab^{-1}\). Tuto proceduru částečně rozšíříme pro matice. Připomeňme ještě, že roli neutrálního prvku při násobení matic hraje jednotková matice. Například pro matice \(\displaystyle 3\times 3\) je jednotková matice
Definice (Inverzní matice)
Buď \(\displaystyle A\in\mathbb R^{n\times n}\) čtvercová matice řádu \(\displaystyle n\). Jestliže existuje čtvercová matice \(\displaystyle A^{-1}\) řádu \(\displaystyle n\), splňující vztahy
Poznámka. Předchozí definice nezaručuje existenci inverzní matice. K některým čtvercovým maticím inverzní matice existuje, k některým ne. Později uvidíme, že existuje jednoduchá charakterizace matic, ke kterým inverzní matice existuje, pomocí determinantu matice.
Věta (Inverze maticového součinu)
Inverzní matice k součinu dvou matic je součinem jednotlivých inverzních matic, ale v opačném pořadí, tj.
Obr. 8.1 Klasickým permutačním hlavolamem je Rubikova kostka. Na něm si můžeme vyzkoušet některé vlastnosti maticového součinu jako nekomutativita nebo nutnost změny pořadí při invertování maticového součinu. Zdroj: congerdesign, pixabay.com.#
Příklad. Pomocí matic a jejich součinu je možné zapsat libovolnou permutaci konečněprvkové množiny. Známým permutačním hlavolamem je Rubikova kostka. Na ní snadno vidíme, že pokud kostku zamícháme ze složeného stavu tahem v horní stěně a poté v pravé stěně, pro opětovné složení musíme vracet tahy v opačném pořadí, tj. nejdřív vrátit tah v pravé stěně a poté ve stěně horní. Pěkně to jde vidět na následující animaci, kterou můžete spustit nebo přehrávat po jednotlivých krocích. Na druhou stranu, tato vlastnost se dá využít k vyřešení Rubikovy kostky naprosto bez algoritmů, protože při vhodně zvolených tazích ovlivníme jenom málo kostiček, například jenom tři.
8.1.1. Inverzní matice k matici popisující rotaci v rovině#
Pro matici rotace
Odsud mimo jiné vidíme, že platí
8.1.2. Ortogonální matice#
Definice (Ortogonální matice)
Ortogonální matice je matice, jejíž transponovaná matice je současně maticí inverzní.
Řádky ortogonální matice jsou tvořeny navzájem kolmými vektory jednotkové délky. Má-li například symetrická čtvercová matice \(\displaystyle A\) řádu \(\displaystyle n\) celkem \(\displaystyle n\) lineárně nezávislých jednotkových vlastních vektorů, potom matice vytvořená tak, že sloupce nebo řádky matice jsou tyto vektory, je ortogonální.
8.2. Matice přechodu#
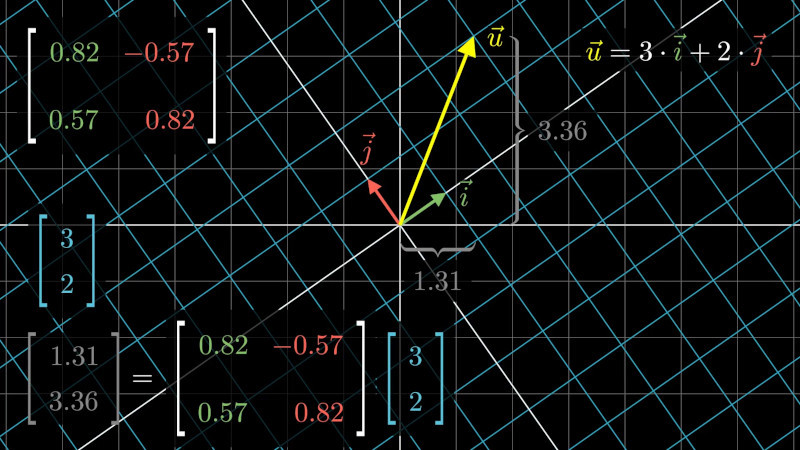
Obr. 8.2 Matice rotace a maticové násobení umožňuje vyjáření souřadnic v různých vzájemně pootočených souřadných soustavách.#
Ukážeme si, že pomocí matic je možné přepočítávat souřadnice mezi jednotlivými souřadnými soustavami. Praktické využití je studium ortotropních materiálů v situace, kdy pro matematický popis jsou výhodné směry os, ale roviny symetrie neodpovídají souřadným rovinám. Například dřevěný kvádr je vhodné studovat tak, že hrany kvádru jsou rovnoběžné se souřadnými osami. Materiálové vlastnosti jsou známy v anatomických směrech dřeva. Pokud tyto směry nejsou nejsou rovnoběžné s osami (kvádr je nařezaný našikmo), je potřeba mezi souřadnými soustavami přecházet. To se dá elegantně udělat pomocí maticového násobení a inverzní matice.
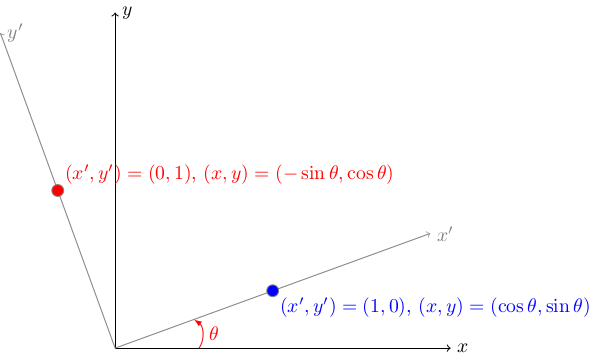
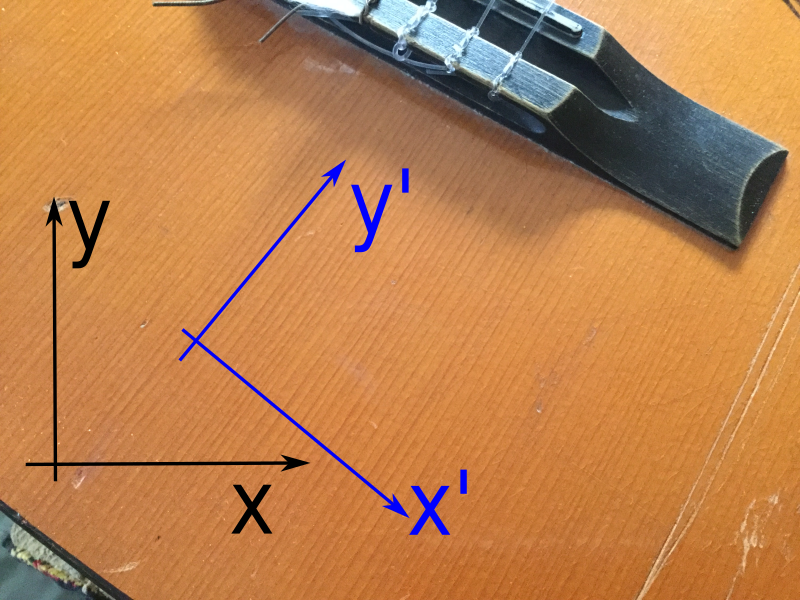
Předpokládejme, že v rovině jsou dány dvě kartézské soustavy souřadnic \(\displaystyle \mathcal B\) a \(\displaystyle \mathcal B'\), které jsou vzájemně pootočené o úhel \(\displaystyle \theta\). V těchto soustavách budou souřadnice \(\displaystyle (x,y)^T\) a \(\displaystyle (x',y')^T\). Je-li soustava \(\displaystyle \mathcal B'\) otočená oproti soustavě \(\displaystyle \mathcal B\) o úhel \(\displaystyle \theta\) proti směru hodinových ručiček, má (viz obrázek) jednotkový vektor ve směru osy \(\displaystyle x'\) v bázi \(\displaystyle \mathcal B\) souřadnice \(\displaystyle (\cos(\theta),\sin(\theta))^T\) a jednotkový vektor ve směru osy \(\displaystyle y'\) má v bázi \(\displaystyle \mathcal B\) souřadnice \(\displaystyle (-\sin(\theta),\cos(\theta))^T\). Proto je vztah mezi souřadnicemi dán maticovým součinem
V inženýrských problémech je častou aplikací lineární algebry transformace úlohy do vhodných souřadnic, ve kterých je popis jednodušší. Zpravidla se jedná o prosté otočení. Toto se používá při studiu dřeva, které má anatomicky význačné směry, při studiu vrstvených materiálů, při studiu chování vodorovně uložených geologických vrstev. Nemusí však vždy jít jenom o materiál s charakteristickými směry. Transformace mezi souřadnicemi se používá například v letectví, kdy je jedna souřadná soustava spojena s trupem a další dvě jsou pootočené ve směru křídel šípovitě připojených k trupu.
Matici transformace popisující otočení souřadnic budeme zkráceně označovat \(\displaystyle R\), pokud budeme potřebovat zdůraznit velikost úhlu, použijeme \(\displaystyle R(\theta)\) a pokud budeme potřebovat matici rozepsat ve složkách, budeme zkracovat výrazy \(\displaystyle \cos\theta\) a \(\displaystyle \sin\theta\) na \(\displaystyle C\) a \(\displaystyle S\) a psát
8.3. Zobrazení v různých soustavách souřadnic#
Ukážeme si důležité využití matice přechodu. Předpokládejme, že máme zobrazení \(\displaystyle f\colon X\to Y\), které je možno charakterizovat maticemi. Na vstupu i výstupu je tedy vektor. Může se jednat třeba o zobrazení, které působícím silám přiřadí deformaci tělesa, což uvidíme v Hookově zákoně později. Může se jednat také o zobrazení, které vektoru charakterizujícímu změnu tlaku v podzemní vodě nebo změnu koncentrace vody ve dřevě přiřadí směr proudění. (Směr podnětu a výsledného proudění si nemusí odpovídat, protože voda je poháněna rozdílem tlaků ve směru největšího poklesu tlaku nebo rozdílem koncentrací ve směru největšího poklesu koncentrace, ale současně si v anizotropním prostředí hledá cestu nejmenšího odporu).
Nechť je naše zobrazení vyjádřeno v nějaké souřadné soustavě \(\displaystyle \mathcal B\) maticí \(\displaystyle A\), tj.
Častým úkolem je zapsat vztahy mezi veličinami tak, aby byly co nejjednodušší a proto jeden z častých úkolů v lineární algebře bývá takovou šikovnou bázi nalézt. Nastíníme neoptimističtější variantu postupu, případné detaily a řešení zádrhelů je možné najít v odborné literatuře. Zpravidla vyjadřujeme zobrazení v bázi tvořené ortonormálními vlastními vektory matice \(\displaystyle A\). Sloupce matice \(\displaystyle P\) jsou vlastní vektory matice \(\displaystyle A\). Pokud je matice \(\displaystyle A\) symetrická, je matice \(\displaystyle P\) navíc ortogonální, její inverze je tedy matice transponovaná. Tomuto procesu se říká diagonalizace matice, protože \(\displaystyle P^{-1}AP\) vychází diagonální a v diagonále vychází právě vlastní čísla matice.
Stejným způsobem se transformují i fyzikální veličiny veličiny popisované maticemi, nazývané tenzory.
8.4. Praktická aplikace: transformace tenzoru#
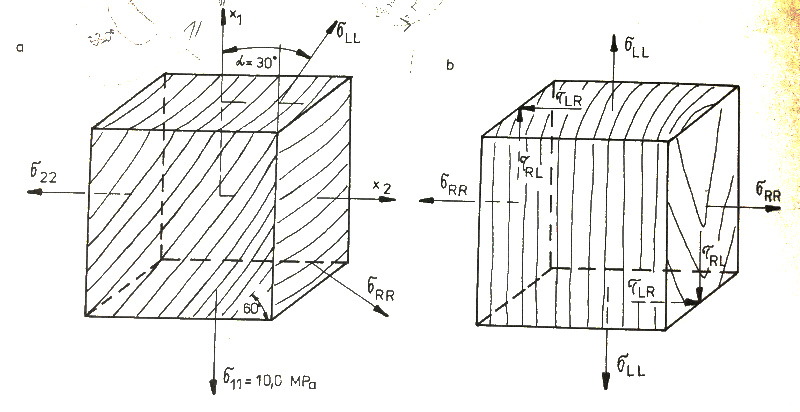
Obr. 8.3 Úloha na transformaci tenzoru napětí do anatomických směrů dřeva. Znázorněná krychlička je jenom reprezentující element většího tělesa. Zdroj: A. Požgaj a kol., Štruktúra a vlastnosti drevá.#
Obr. 8.4 Stejná úloha jako výše (leta ve dřevě jdou pod úhlem 30 stupňů a transformujeme do tohoto směru) méně inženýrským přístupem.#
Obr. 8.5 U šikmého lepeného spoje se používá transformace do roviny spoje k posouzení únosnosti tohoto spoje. Lepidlo má definovanou pevnost spoje při normálovém a smykovém namáhání a transformace nám prozradí, jak se předpokládané namáhání projeví v těchto směrech a zda lepidlo spoj udrží.#
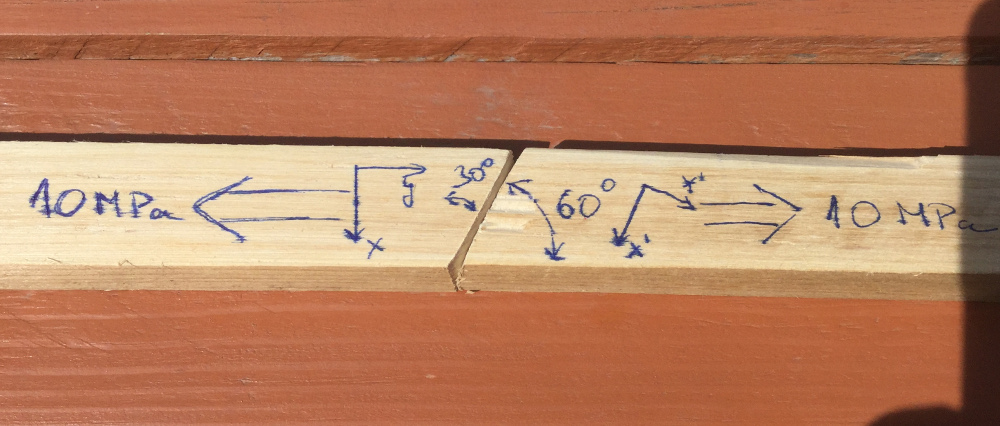
V knize A. Požgaj a kol., Štruktúra a vlastnosti drevá, je následující úloha (str. 322, vydání 1997, ISBN 80-07-00960-4). Dřevo v konfiguraci podle obrázku je namáháno pouze tahovou silou svisle, tedy tenzor napětí má jenom jednu nenulovou složku. Naším cílem je pootočit souřadnou soustavu tak, aby byl tenzor napětí vyjádřen v anatomických směrech dřeva. Úloha je v knize vyřešena pomocí směrových kosinů. Ukážeme si alternativní způsob, který je výhodný v tom, že využívá pouze základní aparát lineární algebry. Původní souřadnice \(\displaystyle (x_1,x_2)\) označíme \(\displaystyle (x,y)\), osa \(\displaystyle x\) směřuje vodorovně vpravo (v obrázku \(\displaystyle x_2\)) a osa \(\displaystyle y\) nahoru (v obrázku \(\displaystyle x_1\)). Tenzor napětí je \(\displaystyle A=\begin{pmatrix} 0 & 0\\0& 10\end{pmatrix}\) (tah pouze ve směru osy \(\displaystyle y\)). Souřadnice je nutno pootočit o \(\displaystyle 30\) stupňů po směru hodinových ručiček, tj. v záporném směru. Nový tenzor napětí (viz Sage nebo Python) je
Výše uvedený výpočet se používá, když chceme najít deformaci vyvolanou působícím napětím. Protože konstanty udávající materiálovou odezvu máme změřeny v anatomických směrech dřeva, je nutno nejprve zjistit, jaké namáhání je v těchto směrech, pomocí materiálových konstant zjistíme, jaká je deformace v těchto směrech a poté zpětnou transformací přepočítáme tuto deformaci do původních souřadnic.
Stejný výpočet používáme, pokud se snažíme transformovat působící napětí při posouzení, jaké smykové a jaké normálové napětí působí na šikmý lepený spoj. Pokud je spoj pod úhlem \(\displaystyle 30\) stupňů a v ose \(\displaystyle y\) působí tahové napětí \(\displaystyle 10\,\mathrm{MPa}\), potom normálové napětí namáhající tento spoj je \(\displaystyle 7.5\,\mathrm{MPa}\) a smykové napětí \(\displaystyle 4.3\,\mathrm{MPa}\).
Volitelný obsah 8.1 (Obecné vzorce pro transformaci tenzoru)

Obr. 8.6 Schopnost transformovat tenzory napětí nebo deformace je důležitá u studia vrstvených materiálů. Ty umožní anizotropii potlačit (překližka) nebo zvýraznit (lyže, luk). Někdy vrstvíme jen tak, pro krásu. Na obrázku Jatawood, pro výrobu rukojetí nožů. Zdroj: jatagan.eu#
Úloha na transformaci tenzoru, kterou jsme řešili v minulém odstavci je v aplikacích velmi důležitá. Proto existuje řada grafických nebo inženýrských metod na řešení tohoto úkolu. Tyto metody jsou důvtipné a názorné, například metoda Mohrovy kružnice, oproti lineární algebře však mají zásadní nevýhodu: uživatel se musí stále učit něco nového a dostává návod „jak“, nikoliv „proč“. Použitím aparátu lineární algebry, stejně jako dokážeme v pootočených souřadnicích vyjádřit libovolné zobrazení, dokážeme vyjádřit v pootočených souřadnicích i libovolný tenzor. Vzorce jsou stejné a navíc při otočení v rovině je matice rotace ortogonální, tj. inverzní matice je maticí transponovanou. Pro symetrický tenzor \(\displaystyle A=\begin{pmatrix} a_{11} & a_{12} \\ a_{12} & a_{22}\end{pmatrix}\) dostáváme v souřadnicích otočených o úhel \(\displaystyle \theta\) proti směru hodinových ručiček
Inverzní operací je pootočení o úhel \(\displaystyle -\theta\) a proto je snadné najít inverzní transformaci: vzhledem k sudosti funkce \(\displaystyle \cos\) a lichosti funkce \(\displaystyle \sin\) stačí změnit znaménko u členů s \(\displaystyle S\), tj.
Poznámka. Pokud vypočteme derivaci členů \(\displaystyle a'_{11}\) a \(\displaystyle a'_{22}\) podle \(\displaystyle \theta\), dostaneme použitím
Pozor. V případě tenzoru deformace se někdy se namísto mimodiagonální komponenty bere její dvojnásobek, protože ten má názorný význam jako úhel smyku. Proto se někdy v literatuře uvádí transformační vzorec pro deformace v upraveném tvaru, kdy u složek se součinem \(\displaystyle CS\) ve třetím sloupci není koeficient \(\displaystyle 2\) a u odpovídajících složek ve třetím řádku tento koeficient naopak figuruje. Je proto potřeba dávat pozor na to, s jakými komponentami je tenzor malých deformací uvažován.
8.5. Role vlastních vektorů při transformaci matic#
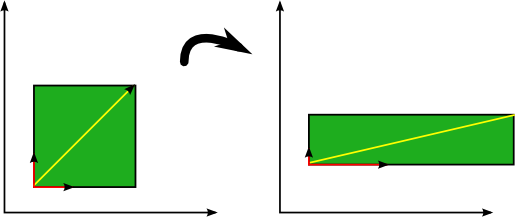
Obr. 8.7 Eigenvectors (red) do not change direction when a linear transformation (e.g. scaling) is applied to them. Other vectors (yellow) do. Zdroj: http://www.visiondummy.com.#
Budeme zkoumat, kdy platí
8.6. Transformace symetrické matice na diagonální tvar#
Věta (Vlastní čísla symetrické matice)
Symetrická čtvercová matice \(\displaystyle A\) řádu \(\displaystyle n\) má \(\displaystyle n\) reálných vlastních čísel (počítáno i s případnou násobností).
Věta (Diagonalizace symetrické matice)
Nechť má symetrická čtvercová matice \(\displaystyle A\) řádu \(\displaystyle n\) celkem \(\displaystyle n\) reálných různých vlastních čísel \(\displaystyle \lambda_i\). Označme odpovídající vlastní vektory jednotkové délky \(\displaystyle \vec v_i\).
Matice \(\displaystyle P\) sestavená tak, že sloupce této matice jsou tvořeny vektory \(\displaystyle \vec v_i\) je ortogonální.
Matice \(\displaystyle D\) definovaná vztahem
\[D=P^TAP\]je diagonální.Diagonální prvky matice \(\displaystyle D\) jsou právě vlastní čísla \(\displaystyle \lambda_i\) a jsou ve stejném pořadí jako odpovídající vlastní vektory v matici \(\displaystyle P\).
Poznámka (Diagonální tvar materiálových vlastností dřeva)
Typickým ortotropním materiálem je dřevo. Pokud transformujeme tenzor difuzní matice pro dřevo na diagonální tvar, jsou diagonální prvky v poměru přibližně \(\displaystyle D_L:D_R:D_T=35:3:2\) (P. Horáček, Fyzikální a mechanické vlastnosti dřeva, 2008 , str. 65). Ortotropní charakter má však nejenom transport tekutin, ale i sesychání a bobtnání. V tomto případě však naopak v podélném směru dřevo bobtná nejméně a tenzor popisující bobtnání má po transformaci na diagonální tvar v diagonále prvky v poměru přibližně \(\displaystyle \alpha_T:\alpha_R:\alpha_L=20:10:1\) (P. Horáček, Fyzikální a mechanické vlastnosti dřeva, 2008 , str. 38).

Obr. 8.8 Pokud je tenzor spojený s materiálovou charakteristikou v diagonálním tvaru, redukuje se složitost problému. Podobná redukce složitosti je i při jiných příležitostech, například při skládání Rubikovy kostky pomocí metody Human Thistlethwaite Algorithm. V této metodě se úloha nejprve redukuje na jednodušší úlohu, kdy každá barva je buď ve svojí straně nebo protilehlé. Tak je možné složit kostku buď bez nepříjemného učení se umělých algoritmů (člověk), nebo do 20 tahů (stroj a nejlepší lidé).#
Matice transformace \(\displaystyle P\) z předchozí věty je ortogonální (její transponovaná matice je současně její inverzní matice) a její determinant (veličina, se kterou se seznámíme vzápětí) je roven \(\displaystyle 1\) nebo \(\displaystyle -1\). Pokud je determinant kladný, reprezentuje matice pootočení soustavy souřadnic. Pokud je determinant záporný, jedná se o pootočení spojené se zrcadlením jedné osy. Protože tento případ většinou z fyzikálních důvodů nepreferujeme, sestavujeme matici transformace tak, aby měla determinant kladný. V případě záporného determinantu stačí prohodit dva vektory (sloupce matice transformace) mezi sebou, nebo jeden vynásobit faktorem \(\displaystyle -1\).
Pro kontrolu je zajímavé vědět, že determinant matice se pootočením nemění a je tedy stejný pro původní i transformovanou matici. Totéž platí pro součet prvků v hlavní diagonále (v lineární algebře se nazývá stopa matice), pro charakteristický polynom a pro vlastní hodnoty. Tenzor, jak jej uvažujeme v tomto textu, je matice, která má navíc fyzikální význam a vzhledem ke své povaze pro ni platí speciální transformační pravidla. Nicméně je to mimo jiné i matice a proto vše výše uvedené platí i pro tenzory.
Transformace tenzorů je užitečná a důležitá činnosti. Bohužel však vzorce s touto transformací spojené nejsou natolik zapamatovatelné, aby bylo obvyklé s nimi pracovat. Možnosti jsou v zásadě tři.
Mít vzorce v psané podobě po ruce a pouze do nich dosazovat.
Mít k dispozici jednoduše zapamatovatelný postup, jak s transformacemi pracovat. Takový postup existuje, nazývá se Mohrova kružnice a po zapracování se jedná o efektivní grafickou metodu pro transforamci tenzorů. Zpravidla je v literatuře popsána pro tenzor napětí, funguje však obecně.
Pracovat pouze s elementárními prostředky lineární algebry. Narozdíl od předchozích bodů máme přehled o tom, co a proč děláme (oproti vzorcům) a nemusíme se učit další metodu (oproti Mohrově kružnici).
8.7. Determinant matice#
Definice (Ddeterminant)
Buď \(\displaystyle A\in\mathbb R^{n\times n}\) čtvercová matice řádu \(\displaystyle n\). Determinant matice \(\displaystyle A\) je reálné číslo \(\displaystyle {\det A}\) přiřazené matici \(\displaystyle A\) následujícím způsobem:
Je-li \(\displaystyle A\) matice řádu \(\displaystyle 1\), tj. \(\displaystyle A=(a_{11})\), je \(\displaystyle \det A=a_{11}\).
Máme-li definován determinant z matice řádu \(\displaystyle (n-1)\) označme symbolem \(\displaystyle M_{ij}\) determinant matice řádu \(\displaystyle (n-1)\), která vznikne z matice \(\displaystyle A\) vynecháním \(\displaystyle i\)-tého řádku a \(\displaystyle j\)-tého sloupce. Definujme algebraický doplněk \(\displaystyle A_{ij}\) prvku \(\displaystyle a_{ij}\) jako součin \(\displaystyle A_{ij}=(-1)^{i+j}M_{ij}\).
Konečně, definujme determinant řádu \(\displaystyle n\) následovně: zvolíme libovolný index \(\displaystyle i\in\{1,2,\dots n\}\) a definujeme
\[ \det A= a_{i1}A_{i1}+ a_{i2}A_{i2}+\cdots+ a_{in}A_{in}. \]
Uff. Zacházejme vyjímečně s touto definicí stejně jako s definicí limity: vezmeme na vědomí, že nějaká korektní definice existuje, ale učit se ji nebudeme. Není to totiž tak úplně potřeba. bude nám stačit naučit se několik málo speciálních případů.
Determinant matice \(\displaystyle A\) označujeme též \(\displaystyle |A|\). Je-li \(\displaystyle A=(a_{ij})\) píšeme zkráceně \(\displaystyle |a_{ij}|\) místo \(\displaystyle |(a_{ij})|\). K záměně s absolutní hodnotou může dojít jedině v případě, že matice \(\displaystyle A\) je řádu jedna. V praxi se však obvykle s maticemi řádu jedna nepracuje.
Definice (Regulární a singulární matice)
Buď \(\displaystyle A\) čtvercová matice. Je-li \(\displaystyle \det A=0\), říkáme, že matice \(\displaystyle A\) je singulární, v opačném případě říkáme, že je regulární.
8.8. Determinant matice \(\displaystyle 2\times 2\) (křížové pravidlo)#
Tento determinant je roven nule právě tehdy, když je jeden řádek matice násobkem druhého a to bude právě tehdy když je jeden sloupec matice násobkem druhého.
8.9. Determinant matice \(\displaystyle 3\times 3\) (Sarusovo pravidlo)#
Mnemotechnická pomůcka: opsat první dva řádky pod determinant, vynásobit hlavní diagonálu a dvě diagonály pod tím, potom vynásobit vedlejší diagonálu a dvě diagonály pod tím. Příspěvky od hlavní diagonály a dvou šikmých řad pod ní se sčítají, příspěvky od vedlejší diagonály a dvou šikmých řad pod ní se odečítají.
8.10. Determinant matice ve schodovitém tvaru#
Definice (Schodovitý tvar)
Řekneme, že matice \(\displaystyle A\) je ve schodovitém tvaru, jestliže případné nulové řádky jsou uspořádány na konci matice a nenulové jsou uspořádány tak, že každý následující řádek začíná větším počtem nul než řádek předchozí.
Příklad. Matice
Věta (Determinant matice ve schodovitém tvaru)
Determinant matice, která je ve schodovitém tvaru je roven součinu prvků v hlavní diagonále.
Totéž platí zejména pro matice diagonální, které mají nenulové prvky jenom v hlavní diagonále a tedy jsou ve schodovitém tvaru.
Příklad. Platí
8.11. Souvislost některých pojmů#
Pojmy lineární algebry spolu krásně souvisí.
Věta (Řešitelnost soustavy souvisí s determinantem a inverzní maticí)
Buď \(\displaystyle A\) čtvercová matice řádu \(\displaystyle n\). Následující výroky jsou ekvivalentní:
K matici \(\displaystyle A\) existuje matice inverzní \(\displaystyle A^{-1}\).
Matice \(\displaystyle A\) je regulární, tj. \(\displaystyle \det A\neq 0\).
Soustava lineárních rovnic
\[AX=B\]má pro libovolnou pravou stranu \(\displaystyle B\) jediné řešení.Homogenní soustava lineárních rovnic
\[AX=0\]má pouze nulové řešení.Každý vektor z \(\displaystyle \mathbb R^n\) lze vyjádřit jako lineární kombinaci vektorů tvořených řádky (sloupci) matice \(\displaystyle A\), a to jednoznačně, až na pořadí.
Například je-li \(\displaystyle \vec q\) vlastním vektorem matice \(\displaystyle A\) příslušným vlastní hodnotě \(\displaystyle \lambda\), platí
Definice (Charakteristická rovnice, charakteristický polynom)
Rovnice
Důsledek (Vlastní čísla)
Vlastní čísla matice \(\displaystyle A\) jsou právě řešení charakteristické rovnice. Vlastní vektor \(\displaystyle \vec u\) příslušný vlastnímu číslu \(\displaystyle \lambda\) je nenulové řešení homogenní soustavy rovnic
Volitelný obsah 8.2 (Hookův zákon, matice tuhosti a poddajnosti)
V minulé přednášce jsme odvodili tvar tenzoru malých deformací pro popis deformace tělesa ve tvaru
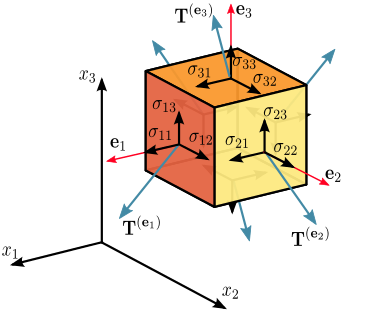
Obr. 8.9 Složky tenzoru napětí charakterizují sílu způsobující deformaci. Zdroj: Wikiepdie.#
Obr. 8.10 Ortotropie dřeva. Zdroj: researchgate.net, Mathew Legg.#
Toto můžeme zapsat symbolicky
Pro deformaci v prostoru máme nikoliv dvě, ale tři souřadnice a tenzor deformací je tedy \(\displaystyle 3\times 3\) symetrická matice, tj. matice, která má šest nezávislých komponent. (Zbylé tři komponenty dostaneme ze symetrie.) Tyto komponenty dostaneme postupnou volbou indexů ve vzorci (8.1) a můžeme je sestavit do sloupcového vektoru
Následující poučka je fyzikálně ověřený fakt, že vztah mezi složkami tenzoru napětí a tenzoru deformace je lineární. To nás nepřekvapí, protože z přednášek o derivacích na začátku semestru víme, že jakákoliv funkční závislost se dá linearizovat. Podstatné zde však je, že interval, na kterém má linearizace smysl, není příliš malý, tj. že tato linearizace platí pro prakticky významné případy.
Hookův zákon deformace (volná slovní formulace). Do určité hranice zatížení je libovolná složka tenzoru deformace úměrná libovolné složce tenzoru napětí.
K tomu si přidejme, že příspěvky k deformaci, způsobené různými složkami tenzoru napětí, se přirozeně sčítají. Matematicky vyjádřeno proto platí
Fyzikální úvahy ukazují, že matice \(\displaystyle S\) je určitě symetrická a obsahuje celkem ne 36, ale jenom 21 nezávislých veličin. Nazývá se matice poddajnosti. V obecném případě tedy musíme pro popis deformace mít celkem 21 materiálových konstant. Tento počet se však výrazně redukuje, pokud je materiál například izotropní nebo ortotropní. Například ortotropní materiál jakým je dřevo, můžeme umístit do soustavy souřadnic tak, aby byl invariantní vůči symetrii podle jednotlivých průměten. Poté je možné odvodit, že nejobecnější možný tvar matice \(\displaystyle S\) je
Pokud bychom použili k popisu obecnou soustavu souřadnic, nebylo by možné se na symetrii odvolávat. Matice \(\displaystyle S\) by obsahovala všechny prvky a bylo by nutné hledat bázi, v níž je její vyjádření nejjednodušší. U dřeva je však snadné rozpoznat význačné směry. Když soustavu souřadnic zvolíme tak, aby byla v souladu s těmito význačnými směry, docílíme tohot, že obdržíme matici \(\displaystyle S\) již přímo ve tvaru s co nejvíce nulami.
Někdy je vhodné umět určit napětí pomocí deformací. K tomu stačí Hookův zákon vynásobit maticí \(\displaystyle S^{-1}\) a obdržíme
Souvislostí vlastních vektorů matice tuhosti a matice poddajnosti (nebo obecněji souvislostí vlastních vektorů matice a matice inverzní) se budeme zabývat na následujícím slidu.
Volitelný obsah 8.3 (Vlastní vektory matice a matice inverzní)
Fyzikální úvaha snadno vede k závěru, že matice a matice inverzní mají stejné vlastní vektory. To proto, že pokud v některém směru je materiálová odezva násobkem podnětu, je i opačně podnět násobkem materiálové odezvy. To, že matice \(\displaystyle A\) a \(\displaystyle A^{-1}\) mají stejné vlastní vektory plyne i z toho, že pokud definiční vztah pro vlastní vektor matice \(\displaystyle A\), tj. vztah
8.12. Shrnutí, hlavní myšlenky#

Obr. 8.11 A jaká je hlavní message? Zdroj: pixabay.com#
Přestože maticový součin nemá všechny vlastnosti na které jsme zvyklí u součinu čísel, jedna vlastnost zůstává: existence „převrácené hodnoty“. V případě matic je zobecnění převrácené hodnoty reprezentováno inverzní maticí.
Pomocí matic je možné transformovat souřadnice bodů, vektorů a tenzorů z jedné soustavy souřadnic do jiné. Inverzní matice poté představuje zpětnou transformaci.
Při transormaci tenzorů se snažíme o to, aby po transformaci byl tenzor co nejjednodušší. Pokud použijeme souřadnou soustavu s osami ve vlastních směrech (jsou kolmé a tedy je tato volba smysluplná), je tento tenzor je diagonální s vlastními čísly v diagonále.
Pro identifikaci vlastních vektorů matice \(\displaystyle A\) je nutné řešit soustavu rovnic
\[(A-\lambda I)v=0,\]ve které figuruje jistým i vlastní číslo \(\displaystyle \lambda\). Toto umožňuje definovat podmínku na vlastní čísla: uvažovaná soustava musí mít nenulové řešení.Existence nenulového řešení rovnice z předchozího bodu úzce souvisí s pojmem determinantu matice. Přesněji, aby soustava z předchozího bodu měla nenulové řešení, musí mít matice \(\displaystyle A-\lambda I\) nulový determinant.