Vlnová rovnice je rovnice popisující kmity strun (v jednorozměrném
případě), membrán (ve dvourozměrném případě) nebo těles (v trojrozměrném
případě). Odvodíme rovnici kmitání strun.
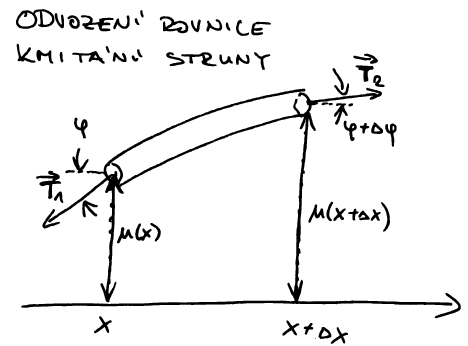
Na kmitající struně uvažujme
v bodě \(\displaystyle x\) element o délce \(\displaystyle \Delta
x\). Výchylku z rovnovážného stavu označme \(\displaystyle u\). Dále označme
\(\displaystyle \vec {\mathcal T}\) sílu, která v tomto bodě napíná strunu, vnitřní
napětí ve struně. Tento vektor má podél struny konstantní velikost a
směr se mění podle zakřivení struny. Označíme-li \(\displaystyle \varphi\) úhel mezi
vektorem \(\displaystyle \vec {\mathcal T}\) a vodorovným směrem, je
\[
\tan \varphi=\frac {\partial
u}{\partial x}
\]
(derivace je směrnice tečny). Na levý konec působí
síla \(\displaystyle \vec {\mathcal T}_1\), kterou pro další počítání rozložíme do
vodorovného a svislého směru. Doleva působí síla o velikosti
\(\displaystyle \mathcal T\cos\varphi\) a dolů síla \(\displaystyle \mathcal T\sin\varphi\). Podobně, na pravý
konec, kde je směrnice tečny \(\displaystyle \varphi+\Delta\varphi\) působí doprava síla
\(\displaystyle \mathcal{T}\cos(\varphi+\Delta\varphi)\) a nahoru síla
\(\displaystyle \mathcal T\sin(\varphi+\Delta\varphi)\). Protože se element pohybuje ve
svislém směru, podle Newtonova pohybového zákona platí
kde \(\displaystyle m\) je hmotnost uvažovaného elementu.
Je-li
lineární specifická hmotnost struny \(\displaystyle \rho\) a délka elementu v rovnovážné
poloze (bez deformace) je přibližně \(\displaystyle \Delta x\), je možno vyjádřit
hmotnost jako \(\displaystyle m=\rho\Delta x\) a dostáváme po úpravě vztah
Potřebujeme nyní vyjádřit výraz
\(\displaystyle \frac{\partial \varphi}{\partial x}\). Ze vztahu
\(\displaystyle \tan \varphi=\frac {\partial u}{\partial x}\) derivováním podle \(\displaystyle x\)
dostáváme
Toto je rovnice popisující kmitavý pohyb struny. Ve
vícerozměrném případě je situace obdobná, pouze na pravé straně
dostaneme Laplaceův operátor a výsledná rovnice
\[
\frac{\partial ^2u}{\partial t^2}=\frac {\cal T}{\rho}\nabla^2 u
\]
se nazývá vlnová rovnice.
Po přeznačení je možno vlnovou rovnici zapsat ve tvaru
\[
\frac{\partial ^2u}{\partial t^2}=c^2\nabla^2 u,
\]
kde \(\displaystyle c\) je kladná konstanta.
Rovnice popisující podélné kmity kmity tyče modulu pružnosti \(\displaystyle E\) a
hustotě \(\displaystyle \rho\) má stejný tvar, přičemž \(\displaystyle c=\sqrt{E}\rho\) je rychlost šíření kmitů.
Trojrozměrná analogie této rovnice je vhodná pro popis elastických kmitů
(chvění) v tělese.
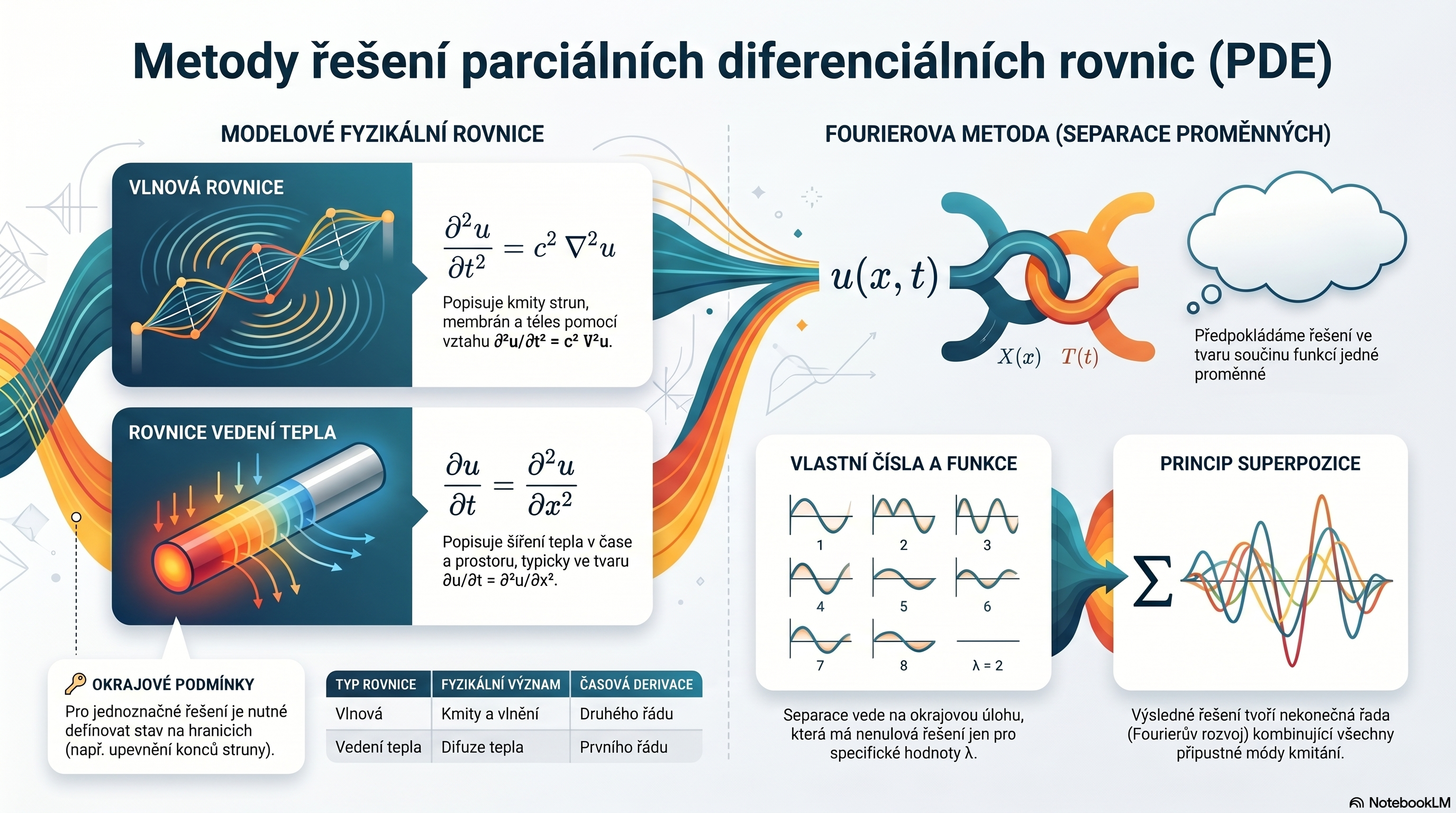
Jedna z nejjednodušších metod řešení parciálních diferenciálních
rovnic spočívá v tom, že se řešení rovnic snažíme najít v nějakém
konkrétním tvaru, který nám umožní rovnici redukovat na několik rovnic
jednodušších. Je možné ji použít i pro rovnici vedení tepla, i pro vlnovou rovnici. Ukážeme ji na rovnici vedení tepla, protože obsahuje jednodušší závislost na čase - je zde derivace pouze prvního řádu.
Uvažujme šíření tepla v tyči jednotkové délky bez vnitřních zdrojů
tepelné energie, popsané po případné transformaci jednotek diferenciální rovnicí
Pro jednoznačný popis děje je nutno zadat počáteční
teplotu \(\displaystyle \varphi(x)\) ve všech bodech tyče a podmínky, které udávají,
v jakém prostředí se tyč nachází – například teplotu konců tyče. Máme
tedy podmínky
a po dosazení do
rovnice a po vydělení faktorem \(\displaystyle X(x)T(t)\) dostaneme
\[
\frac {T'(t)}{T(t)}=\frac {X''(x)}{X(x)}.
\]
Protože levá strana závisí pouze na \(\displaystyle t\) a pravá strana
pouze na \(\displaystyle x\), musí být obě strany rovny stejné konstantě. Tuto konstantu
zapíšeme z důvodů které budou patrné později jako \(\displaystyle -\lambda^2\).
Z počátečních a okrajových podmínek naložených na funkce \(\displaystyle u\) plyne, že
funkce \(\displaystyle X\) musí splňovat
\[
X(0)=0=X(1).
\]
Funkce \(\displaystyle X\) a \(\displaystyle T\) tedy musí splňovat vztahy
se nazývá okrajová úloha a věnovali jsme se jí v kapitole o diferenciálních rovnicích druhého řádu.
Netriviální řešení této úlohy existuje jen pro některé hodnoty parametru \(\displaystyle \lambda\). Hodnota \(\displaystyle \lambda^2\), pro kterou existuje netriviální řešení okrajové úlohy, se nazývá vlastní číslo a příslušné řešení se nazývá vlastní funkcí.
Z rozboru v kapitole věnované diferenciálním rovnicím druhého řádu víme, že obecné řešení rovnice \(\displaystyle X''+\lambda^2 X=0\) je tvaru
kde \(\displaystyle A\) a \(\displaystyle B\) jsou reálné konstanty. Z podmínky \(\displaystyle X(0)=0\) plyne, že \(\displaystyle A=0\). Z podmínky \(\displaystyle X(1)=0\) pak plyne, že \(\displaystyle B\sin(\lambda)=0\). Nechť \(\displaystyle B\neq 0\) (jinak by řešení bylo triviální).
Platí tedy \(\displaystyle \sin(\lambda)=0\), neboli \(\displaystyle \lambda=k\pi\), kde \(\displaystyle k\) je
přirozené číslo. Vlastní hodnoty jsou tedy tvaru
Protože řešení rovnice
hledáme ve tvaru \(\displaystyle u(x,t)=X(x)T(t)\), můžeme
výsledky předchozích odstavců shrnout do poznatku, že pro libovolnou
konstantu \(\displaystyle C_k\) a libovolné přirozené číslo \(\displaystyle k\) je funkce
Protože máme zadánu počáteční podmínku
ve tvaru \(\displaystyle u(x,0)=\varphi(x)\), potřebujeme najít
konstanty \(\displaystyle C_k\) takové, že platí
může pro konkrétní hodnoty koeficientů \(\displaystyle a_i\), \(\displaystyle b_i\)
konvergovat k nějaké funkci \(\displaystyle f(x)\) a za jistých podmínek je tato
funkce dostatečně pěkná: je spojitá, je možno ji derivovat člen po členu
apod.
Při řešení rovnic matematické fyziky řešíme opačný problém: pro zadanou
funkci \(\displaystyle f(x)\) na intervalu \(\displaystyle [-\pi,\pi]\) chceme nalézt koeficienty \(\displaystyle a_i\),
\(\displaystyle b_i\) tak, aby na tomto intervalu platilo
Tyto vztahy je možno zobecnit i na jiné intervaly než
\(\displaystyle [-\pi,\pi]\) a také pro jiné funkce než goniometrické – je možné použít
například systém všech vlastních funkcí okrajové úlohy. V našem případě
je možné ukázat, že pokud platí
V
tomto tvaru rovnice neobsahuje žádné konstanty a je to tvar, se kterým
se pracuje ve většině matematických publikací. Reálnou rovnici vedení
tepla převedeme do tohoto tvaru zavedením bezrozměrných veličin, což
si ukážeme v následující přednášce. Teď si ukážeme, jak řešení rovnice
vede na řešení LDR druhého řádu. Uvažujme pro jednoduchost okrajovou
úlohu, kdy konce tyče jsou udržovány na nulové teplotě, tj. je-li tyč
délky \(\displaystyle l\) položena v ose \(\displaystyle x\) tak, že levý konec je v počátku, platí pro
teplotu \(\displaystyle u(x,t)\) podmínky \(\displaystyle u(0,t)=u(l,t)=0\) v libovolném čase \(\displaystyle t\).
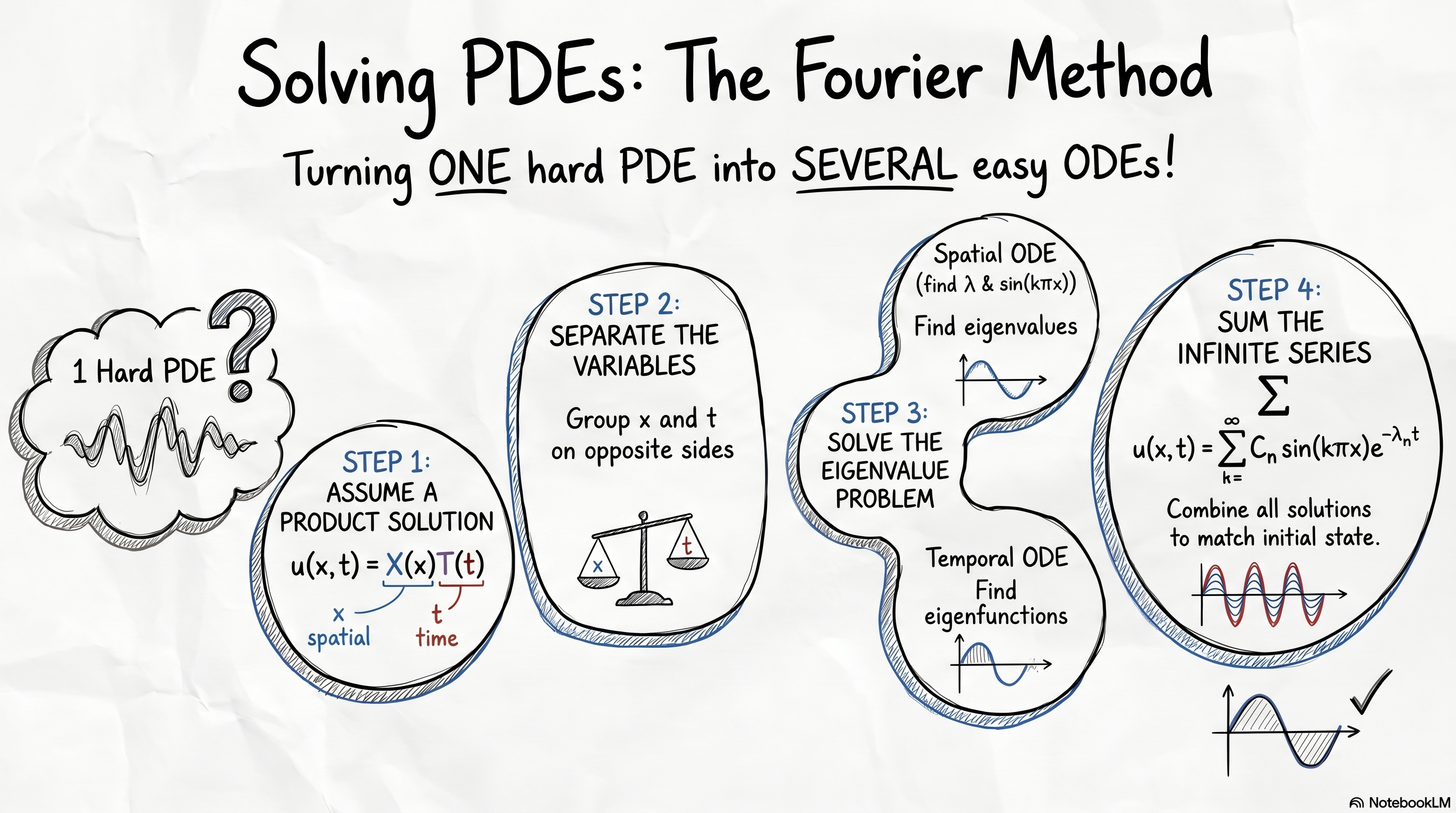
Budeme řešení hledat ve tvaru \(\displaystyle u(x,t)=\varphi(x)\psi(t)\), kde \(\displaystyle \varphi\) a \(\displaystyle \psi\) jsou funkcemi jedné proměnné.
Platí
Toto je rovnice, kde levá strana je funkcí proměnné \(\displaystyle t\) a pravá strana funkcí proměnné \(\displaystyle x\). Obě proměnné jsou však nezávislé a uvedená rovnost může být splněna jen tehdy, když se rovnají společné konstantě.
Okrajové podmínky vynucují platnost vztahů \(\displaystyle \varphi(0)=\varphi(l)=0\). Jesliže je v takovém případě konstanta \(\displaystyle \omega\) kladná, má úloha pouze nulové řešení (viz výše výpočet vlastních hodnot pro tuto úlohu). Konstanta \(\displaystyle \omega\) tedy musí být záporná.
Přeznačme ji do tvaru
První rovnice představuje lineární diferenciální rovnici prvního řádu
\[\psi'=-\lambda^2\psi\]
s partikulárním řešením \(\displaystyle \psi(t)=e^{-\lambda^2 t}.\)
Druhá rovnice představuje společně s okrajovou podmínkou okrajovou úlohu pro lineární diferenciální rovnici druhého řádu
Máme tedy Dirichletovu úlohu na vlastní čísla a vlastní funkce, jak jsme ji viděli u kmitů struny nebo u namáhání na vzpěr. Řešením je funkce \(\displaystyle \varphi(x)=\sin(\lambda x)\), kde \(\displaystyle \lambda\) je vlastní hodnota této úlohy.
Funkce
kdy na levé straně stojí lineární operátor a na pravé straně je nula. Proto je každá lineární kombinace řešení opět řešením a pro libovolnou volbu konstant je funkce
také řešením. Součet na pravé straně je přes všechna vlastní čísla, kterých je nekonečně mnoho.
Nyní začíná být rozbor úlohy nad rámec našeho kurzu, protože se
objevil nekonečný součet. Ukazuje se, že tento zápis je dostatečně
bohatý na to, aby obsáhl libovolnou rozumnou počáteční podmínku a
vzorec je tedy schopen popsat řešení úlohy pro libovolné fyzikálně
relevantní situace. Vidíme i přímo strukturu řešení, které je jakousi
lineární kombinací různých módů. Tato skutečnost lépe vynikne na
analogické diferenciální rovnici kmitání struny, kdy jednotlivé módy
přímo vnímáme sluchem: struna nemůže kmitat na libovolné frekvenci, ale
pouze a frekvenci dané okrajovou podmínkou a na frekvencích násobných.
Poznámka: Podobná situace a možnost separace proměnných je u rovnice
kmitů struny
nebo jejího zobecnění na kmity desek a chvění těles. Opět separace vede k LDR druhého řádu pro složku závisející na \(\displaystyle x\). V tomto případě je druhého řádu i rovnice pro složku závislou na čase.