11. Lineární diferenciální rovnice druhého řádu#
Anotace.
Lineární diferenciální rovnice druhého řádu se vyskytují v úlohách z mechaniky a při řešení difuzní rovnice.
Soustřeďte se na vysvětlení, jak souvisí DR druhého řádu se zrychlením tělesa a působící silou v úlohách z mechaniky, jak se může jednorozměrná difuzní stacionární rovnice redukovat na LDR druhého řádu a jak se metodou separace proměnných dá nestacionární difuzní rovnice rozdělit na obyčejnou diferenciální rovnici prvního a druhého řádu.
Soustřeďte se na pasáže týkající se toho, jak okrajová podmínka dokáže vybrat hodnoty parametrů, pro které existuje nenulové řešení. To determinuje například frekvenci při mechanickém kmitání.
Numerické experimenty s rovnicí. Konkrétní nalezení řešení rovnice pomocí řešení kvadratické rovnice, pomocí metody neurčitých koeficientů pro nalezení partikulárního řešení atd. je pro nás málo zajímavé a věnujte se mu případně až v poslední fázi.
11.1. Lineární diferenciální rovnice druhého řádu#
Definice (Lineární diferenciální rovnice druhého řádu)
Buďte \(\displaystyle p\), \(\displaystyle q\) a \(\displaystyle f\) funkce definované a spojité na intervalu \(\displaystyle I\). Diferenciální rovnice
se nazývá lineární diferenciální rovnice druhého řádu. Řešením rovnice (nebo též integrálem rovnice) na intervalu \(\displaystyle I\) rozumíme funkci, která má spojité derivace do řádu \(\displaystyle 2\) na intervalu \(\displaystyle I\) a po dosazení identicky splňuje rovnost (11.1) na \(\displaystyle I\). Úloha nalézt řešení rovnice, které splňuje v bodě \(\displaystyle x_0\in I\) počáteční podmínky
kde \(\displaystyle y_0\) a \(\displaystyle y'_0\) jsou reálná čísla, se nazývá počáteční úloha (Cauchyova úloha). Řešení počáteční úlohy se nazývá partikulární řešení rovnice.
Zkratky: LDE - lineární diferenciální rovnice, IC - počáteční podmínka, IVP - počáteční úloha
11.2. Příklad - těleso na pružině#

Obr. 11.1 Těleso na pružině je nejjednodušší model pro rovnice druhého řádu. Přesto není vhodné tento model podceňovat, dokáže být velmi užitečný i u jiných úloh, které se týkají oscilací. Chemické oscilace, považované za základ tzv. buněčných hodin i jiných vnitřních cyklů biologických organismů, jsou ale založeny na jiném popisu. (Viz Brusselator.) Zdroj: pixabay.com#
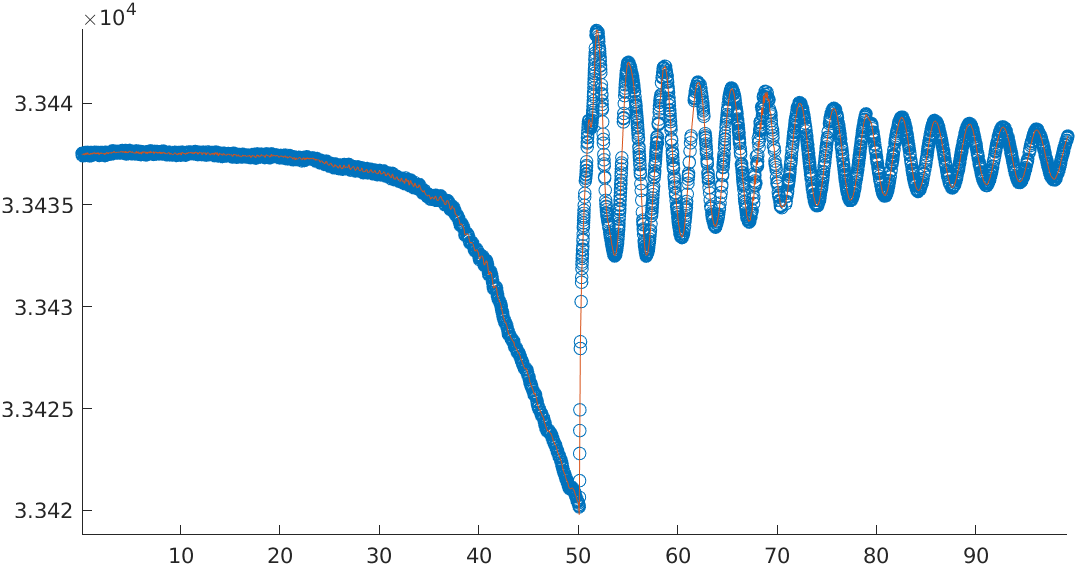
Obr. 11.2 Vlastní kmity bodu na kmeni stromu ve výšce 4m po vychýlení stromu z rovnovážné polohy a vypuštění. Až na úvodní pasáž v čase cca 52 sekund výchylka odpovídá tlumenému kmitání tělesa na pružině. Zdroj: projekt DYNATREE#
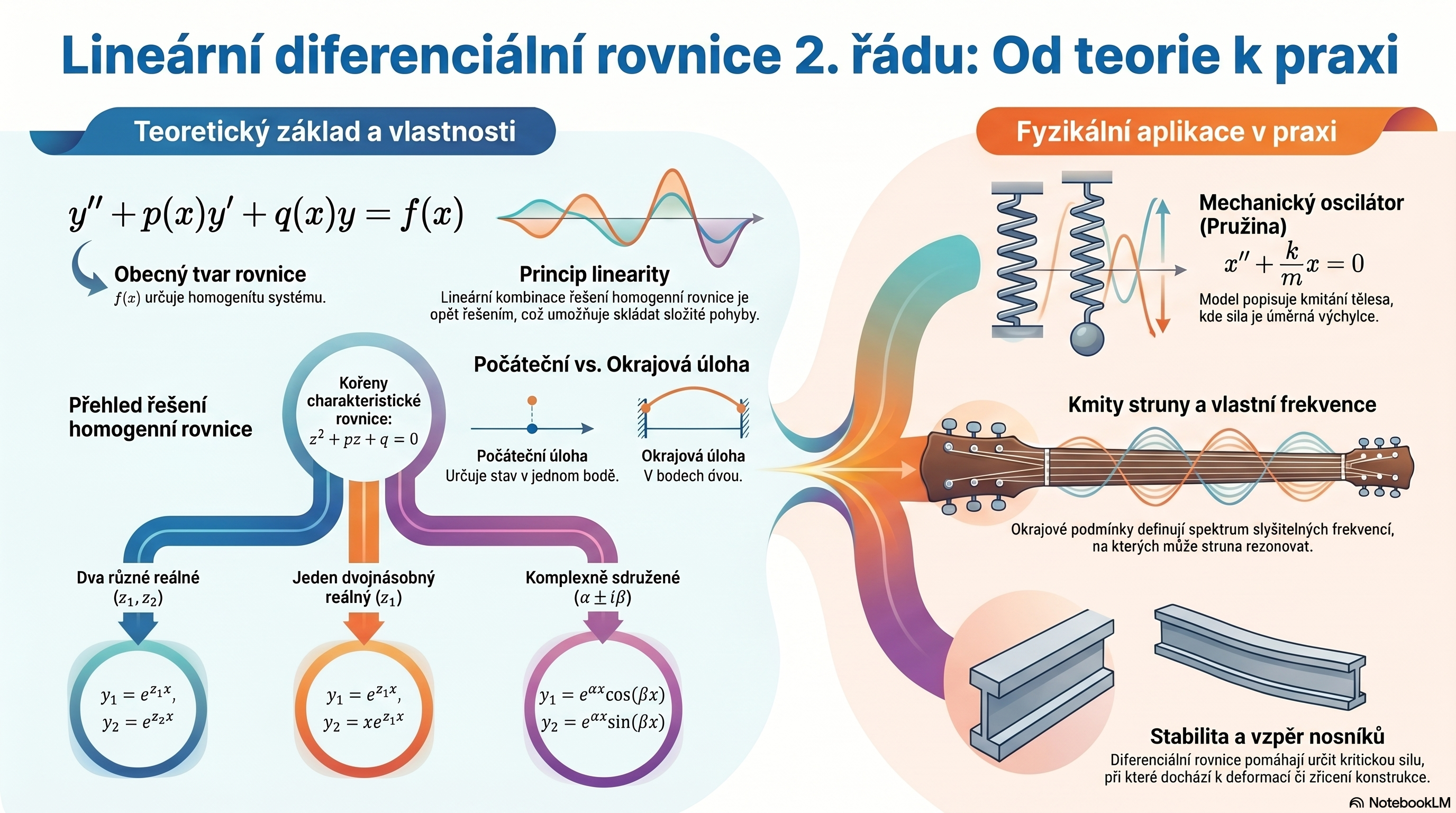
Kmity tělesa o hmotnosti \(\displaystyle m\) pružně připevněného k nehybné podložce spojem tuhosti \(\displaystyle k\) jsou popsány diferenciální rovnicí \(\displaystyle {\ddot x+\frac km x=0}.\) Zde navíc používáme fyzikální úzus označovat derivace podle času pomocí tečky a ne čárky. Symbol \(\displaystyle \ddot x\) tedy značí druhou derivaci funkce \(\displaystyle x\), kde \(\displaystyle x\) bereme jako funkci času.
Jednoduchým mechanickým modelem je těleso na pružině. Zde je deformace úměrná působící síle. Analogické situace vedoucí na stejnou rovnici však dostáváme i obecněji. Pokud pro jednoduchost předpokládáme, že těleso s jedním stupněm volnosti se nachází ve stabilním stavu s minimem potenciální energie a energie závisí na poloze \(\displaystyle x\), můžeme v okolí minima \(\displaystyle x_0\) potenciální energii aproximovat Taylorovým rozvojem druhého řádu
Situace tedy perfektně koresponduje s kmitáním na pružině i když potenciální energie uvažovaná v tomto odstavci může být jiného charakteru. Něco podobného jsme viděli již u autonomních systémů, kdy systém modelující tlumený oscilátor z přednášky byl stejný jako systém modelující regulaci topení ze cvičení a tento systém byl jenom lépe představitelnou realizací systému regulace syntézy proteinů.
11.3. Řešitelnost LDE druhého řádu#
Budeme se zabývat řešitelností diferenciální rovnice (11.1), tj. rovnice
Věta (o existenci a jednoznačnosti řešení LDE druhého řádu)
Každá počáteční úloha pro LDE druhého řádu má řešení, které je určeno jednoznačně a toto řešení je definované na celém intervalu \(\displaystyle I\).
Definice (speciální typy LDE druhého řádu)
Platí-li v rovnici (11.1) \(\displaystyle f(x)=0\) pro všechna \(\displaystyle x\in I\), nazývá se rovnice (11.1) homogenní, v opačném případě nehomogenní.
Jsou-li koeficienty \(\displaystyle p(x)\) a \(\displaystyle q(x)\) na intervalu \(\displaystyle I\) konstantní funkce, nazývá se (11.1) rovnice s konstantními koeficienty.
Definice (triviální řešení)
Funkce \(\displaystyle y(x)\equiv 0\) je řešením homogenní LDE druhého řádu
Definice (asociovaná homogenní rovnice)
Nahradíme-li v nehomogenní LDE pravou stranu (tj. funkci \(\displaystyle f\)) nulovou funkcí, obdržíme rovnici
Definice (obecné řešení)
Všechna řešení LDE druhého řádu lze vyjádřit ve tvaru obsahujícím dvě nezávislé konstanty \(\displaystyle C_1\), \(\displaystyle C_2\in\mathbb{R}\). Takovýto předpis se nazývá obecné řešení rovnice (11.1).
11.4. Důsledky linearity#
Nechť \(\displaystyle L\) je lineární diferenciální operátor druhého řádu. Jako speciální případ vztahu
Platí
\[L[y_1]=L[y_2]=0\ \implies \ L[C_1y_1+C_2y_2]=0,\]tj. každá lineární kombinace dvou řešení homogenní LDE je opět řešením této rovnice. Pokud se nám navíc podaří volbou konstant \(\displaystyle C_1\) a \(\displaystyle C_2\) splnit libovolnou počáteční podmínku, je jistota, že máme obecné řešení.Platí
\[L[y_2]=0 \text{ a } L[y_1]=f(x)\ \implies\ L[y_1+y_2]=f(x),\]tj. součet řešení nehomogenní a asociované homogenní LDE je řešením původní nehomogenní rovnice. Pokud je navíc \(\displaystyle y_2\) obecným řešením homogenní rovnice, je \(\displaystyle y_1+y_2\) obecným řešením nehomogenní rovnice, protože se podaří splnit libovolnou počáteční podmínku.
11.5. Důsledky linearity prakticky#
Vztah
Rovnice
má partikulární řešení \(\displaystyle y=x\).
Asociovaná homogenní rovnice je
Tato rovnice má řešení například \(\displaystyle y=\sin x\), \(\displaystyle y=\cos x\). Z linearity plyne
Funkce \(\displaystyle y=C_1 \sin x+C_2 \cos x\) je řešením rovnice (11.4) pro libovolná reálná \(\displaystyle C_1\), \(\displaystyle C_2\). Protože platí \(\displaystyle y(0)=C_2\) a \(\displaystyle y'(0)=C_1\), je možné splnit libovolnou podmínku \(\displaystyle y(0)=\alpha\), \(\displaystyle y'(0)=\beta\) volbou \(\displaystyle C_2=\alpha\) a \(\displaystyle C_1=\beta\). Jedná se tedy o obecné řešení.
Funkce \(\displaystyle y=C_1 \sin x+C_2\cos x +x\) je obecným řešením rovnice (11.4).
11.6. Homogenní LDE 2. řádu (obecné řešení)#
Věta (obecné řešení homogenní LDE)
Jsou-li \(\displaystyle y_1\) a \(\displaystyle y_2\) dvě netriviální lineárně nezávislá řešení rovnice (11.5) na intervalu \(\displaystyle I\), pak funkce \(\displaystyle y\) definovaná vztahem
Dvojicí lineárně nezávislých řešení rozumíme taková dvě řešení, že jedno není násobkem druhého.
Definice (fundamentální systém řešení)
Dvojici funkcí \(\displaystyle y_1\) a \(\displaystyle y_2\) z předchozí věty nazýváme fundamentální systém řešení rovnice (11.5).
11.7. Homogenní LDE 2. řádu s konstantními koeficienty#
Rovnici
U řešitelnosti této rovnice hraje velkou roli charakteristická rovnice matice soustavy, která je obsažena v následující definici.
Definice (charakteristická rovnice)
Kvadratická rovnice
Věta (o obecném řešení LDE s konstantními koeficienty)
Uvažujme LDE
a její charakteristickou rovnici
Jsou-li \(\displaystyle z_1,z_2\in\mathbb{R}\) dva různé reálné kořeny charakteristické rovnice, definujme
\[{y_1=e^{z_1 x}}, \qquad{y_2=e^{z_2 x}}.\]Je-li \(\displaystyle z_1\in\mathbb{R}\) dvojnásobným kořenem charakteristické rovnice, definujme
\[{y_1=e^{z_1 x}}, \qquad{y_2=xe^{z_1 x}}.\]Jsou-li \(\displaystyle z_{1,2}=\alpha\pm i\beta\not\in\mathbb{R}\) dva komplexně sdružené kořeny charakteristické rovnice, definujme
\[{y_1(x)=e^{\alpha x}\cos(\beta x)}, \qquad {y_2(x)=e^{\alpha x}\sin(\beta x)}.\]
Potom obecné řešení rovnice (11.6) je
11.8. Nehomogenní LDE 2. řádu#
Věta (o obecném řešení nehomogenní LDE)
Součet libovolného partikulárního řešení nehomogenní lineární diferenciální rovnice a obecného řešení asociované homogenní rovnice je obecným řešením původní nehomogenní rovnice
Následující věta udává jednu z metod nalezení partikulárního řešení, pokud je diferenciální rovnice do jisté míry speciální: má konstantní koeficienty a polynomiální pravou stranu.
Věta (metoda neurčitých koeficientů)
Uvažujme lineární diferenciální rovnici druhého řádu
V praxi polynom, který má být řešením, napíšeme s neurčitými koeficienty a dosazením do rovnice určíme potřebné hodnoty těchto koeficientů.
11.9. Dirichletova okrajová úloha, vlastní čísla#
Někdy je nutné řešit diferenciální rovnice druhého řádu s jinými než počátečními podmínkami. Ukážeme si na jednoduchém příkladě odlišnost od počáteční úlohy. Následující úloha má velké uplatnění při studiu kmitavých pohybů.
Pro parametr \(\displaystyle \lambda\in\mathbb{R}\) najděte řešení rovnice
splňující podmínky
Definice (okrajová úloha)
Úloha najít řešení diferenciální rovnice (11.7), které splňuje podmínky (11.8) se nazývá (Dirichletova) okrajová úloha.
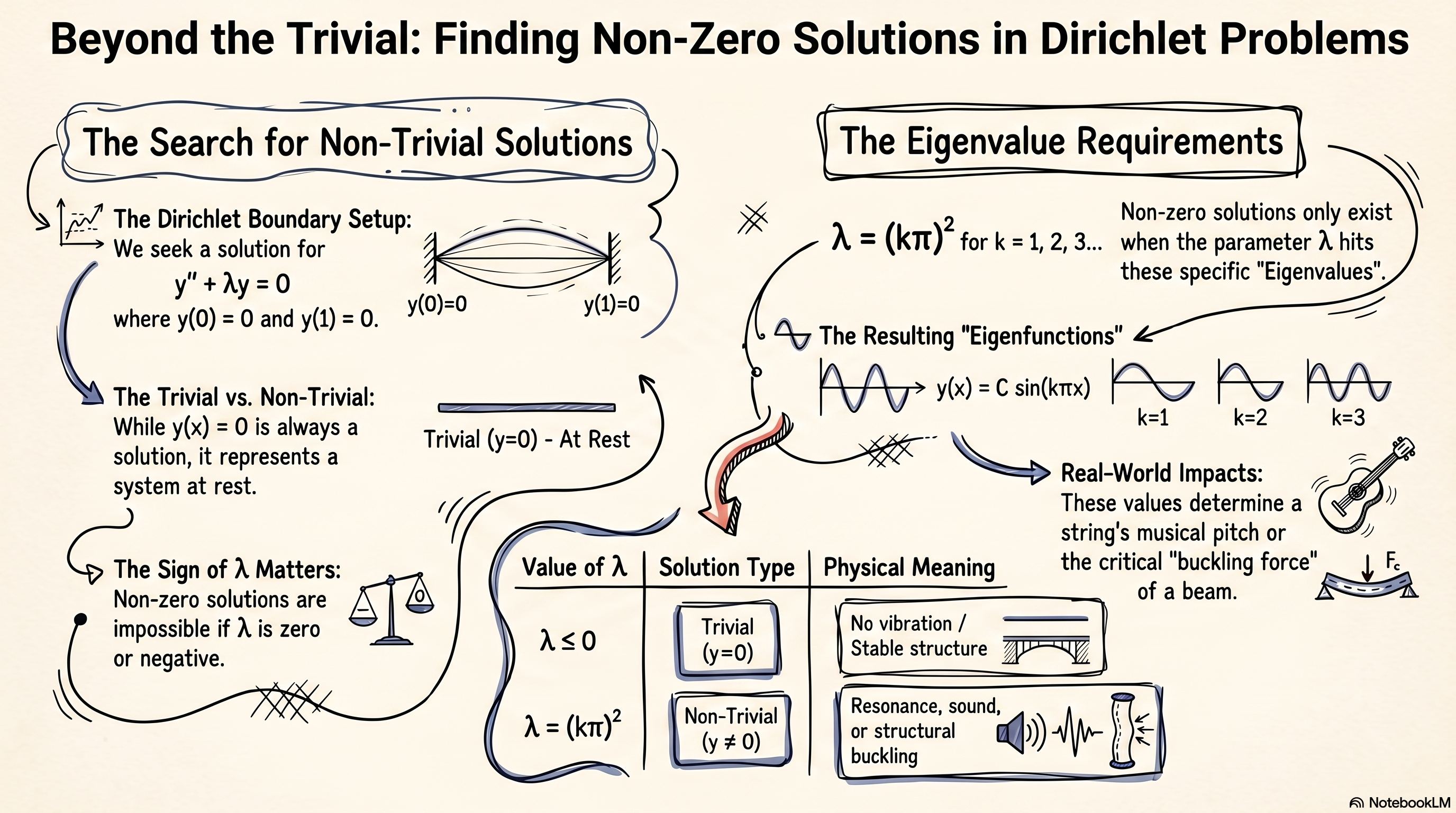
Obr. 11.3 U Dirichletovy úlohy je důležité rozlišit, zda existuje pouze triviální řešení, nebo zda jsou k dispozici i netriviální řešení.#
Odlišnost Dirichletovy úlohy od (Cauchyovy) počáteční úlohy je v tom, že nezadáváme funkční hodnotu a derivaci v jednom bodě, ale funkční hodnotu ve dvou různých bodech.
Jedno z řešení Dirichletovy úlohy je triviální řešení \(\displaystyle y(x)=0\). Ukazuje se, že netriviální řešení existuje jen pro některé hodnoty parametru \(\displaystyle \lambda\).
Definice (vlastní funkce, vlastní hodnota okrajové úlohy)
Hodnota \(\displaystyle \lambda\), pro kterou existuje netriviální řešení Dirichletovy okrajové úlohy, se nazývá vlastní hodnota okrajové úlohy a příslušné řešení se nazývá vlastní funkce okrajové úlohy.
11.10. Výpočet vlastních hodnot#
11.10.1. Případ \(\displaystyle \lambda>0\)#
Je-li \(\displaystyle \lambda>0\), je řešením rovnice
funkce
Z podmínky \(\displaystyle y(1)=0\) dostáváme
Okrajová úloha
11.10.2. Případ \(\displaystyle \lambda<0\)#
Je-li \(\displaystyle \lambda<0\), je řešením rovnice
Z podmínky \(\displaystyle y(1)=0\) dostáváme
11.10.3. Obvyklá formulace#
V praktických úlohách, kdy požadujeme existenci nenulového řešení, zpravidla pracujeme s rovnicí ve tvaru
11.11. Kmity struny#

Obr. 11.4 Kmitání jednorozměrných objektů je popsáno lineární diferenciální rovnicí druhého řádu. Zdroj: pixabay.com#
Při kmitání struny délky \(\displaystyle l\) upevněné na koncích se ukazuje, že proces je možno modelovat okrajovou úlohou
a \(\displaystyle y=0\) jinak. Při podrobnějším popisu se ukazuje, že \(\displaystyle \lambda\) souvisí s hmotností struny, napětím ve struně a frekvencí, kterou slyšíme. Podmínka (11.9) určuje spektrum slyšitelných frekvencí, na kterých může struna kmitat, výsledný pohyb (a zvuk) je díky linearitě složením jednotlivých variant. Toho se dá s výhodou vyžívat a stejnou strunu je možné rozeznívat více způsoby a dosahovat různý výsledný zvuk.
11.12. Vzpěry#

Obr. 11.5 Nosníky, ať už samostatné vzpěry, nebo součásti příhradových konstrukcí, je nutné posuzovat i z hlediska axiálního namáhání. Ignorování tohoto způsobu namáhání vedlo v 19. století k pádu několika příhradových železničních mostů a následnému stržení řady chybně dimenzovaných mostů. Zdroj: pixabay.com#
Předpokládejme, že máme nosník namáhaný na vzpěr. Nosník je uchycen na dolním a horním konci tak, že se nemůže pohybovat do stran, ale může se otáčet. Osu \(\displaystyle x\) zvolíme podélně v ose vzpěry, osu \(\displaystyle y\) kolmo. Při namáhání takového nosníku je výchylka dána okrajovou úlohou (A. Požgaj a kol., Štruktúra a vlastnosti dreva, str. 359)
11.13. Neumannova a smíšená okrajová úloha#
Při řešení Dirichletovy úlohy hledáme řešení diferenciální rovnice druhého řádu s předepsanými hodnotami ve dvou různých bodech
V praxi je možné si představit i jiné podmínky. Například v termodynamice se používají podmínky na hodnotu derivací ve dvou různých bodech
Existují i smíšené úlohy, kdy na jednom konci je podmínka na funkční hodnotu a na druhém konci na hodnotu derivace. S takovou úlohou se setkáváme například při modelování teplotního pole, kdy na jednom konci je pevně daná teplota a na druhém konci je pevně daný tepelný tok.