11. Základy teorie elasticity#
11.1. První a druhá impulsová věta.#
11.1.1. Popis posuvného a rotačního pohybu tělesa#
Fyzikální parametry pro popis posuvného pohybu tělesa:
hmotnost tělesa \(m\)
rychlost tělesa \(\vec v\)
hybnost tělesa \(\vec p = m \vec v\)
Fyzikální parametry pro popis rotačního pohybu tělesa:
moment setrvačnosti tělesa \(J\)
úhlová rychlost tělesa \(\vec \omega\)
moment hybnosti tělesa \(\vec L = J \vec \omega\)
11.1.2. Impulsové věty#
Věta (První impulsová věta)
Časová změna celkové hybnosti tělesa (soustavy) je rovna součtu vnějších sil působících na těleso (soustavu).
Věta (Druhá impulsová věta)
Časová změna celkového momentu hybnosti tělesa (soustavy) je rovna celkovému momentu vnějších sil působících na těleso.
11.1.3. Podmínky rovnováhy#
Věta (Podmínka statické rovnováhy)
11.2. Teorie elasticity#
11.2.1. Deformace, namáhání a Hookův zákon v 1D#
Normálové napětí \(\varsigma = \frac FS\), síla působící na jednotku plochy.
Normálová deformace \(\varepsilon = \frac{\Delta l}{l_0}\), relativní prodloužení, udává, o kolik procent se materiál prodlouží (kladná hodnota) nebo zkrátí (záporná hodnota).
Hookův zákon: normálové napětí \(\sigma\) a normálová deformace \(\varepsilon\) jsou si úměrné. Platí
\[\varepsilon = \frac 1E \sigma.\]Konstanta \(E\) je modul pružnosti v tahu, který charakterizuje tuhost materiálu. Čím větší je modul pružnosti, tím méně se materiál deformuje při působení daného napětí.
11.2.2. Deformace, namáhání a Hookův zákon ve 2D#
11.2.3. Deformace, namáhání a Hookův zákon ve 3D#
11.2.3.1. Tenzor napětí#
Napětí je podílem velikosti působící síly a velikosti plochy, na kterou tato síla působí. Pro sílu kolmou k ploše mluvíme o normálovém napětí, pro sílu ve směru plochy o smykovém napětí.
Znaménková konvence - viz obrázek. Napětí v obrázku jsou kladná, opačná napětí jsou záporná. Kladné normálové napětí tedy značí tah, záporné tlak.
V obrázku jsou napěí pouze na třech stěnách, na zbylých šesti jsou odpovídající napětí tak, aby element byl ve statické rovnováze, tj. aby výsledná síla a výsledný moment byly nulové.

Tenzor napětí je bilineární forma, umožňuje výpočet síly na libovolně orientované ploše
11.2.3.2. Praktická ukázka tenzoru napětí v tříbodovém ohybu#
11.2.3.2.1. Tříbodový ohyb, tah v podélném směru#
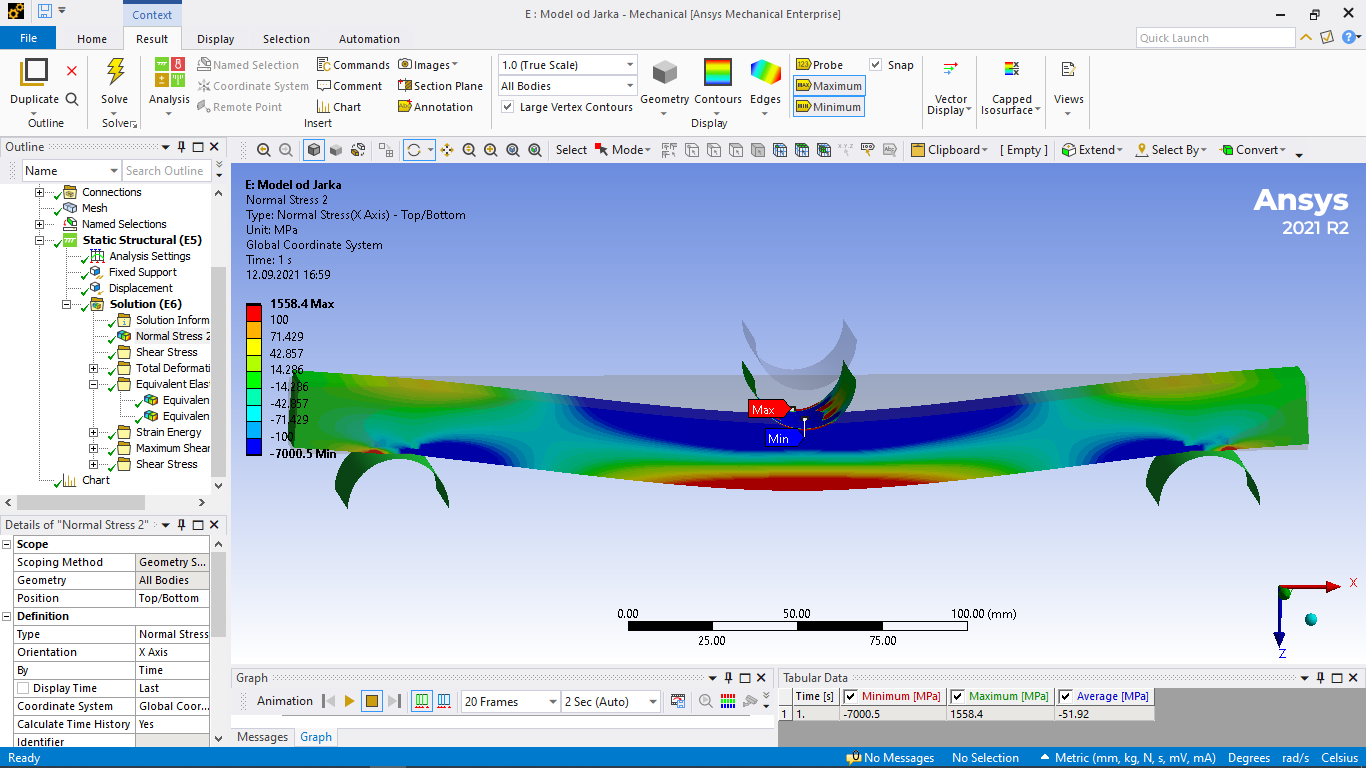
Tah na spodní straně, tlak na horní straně a před podpěrami. Zeleně neutrální oblast, kde je napětí nulové.
11.2.3.2.2. Tříbodový ohyb, tah v podélném směru pro čtvrtinu nosníku#
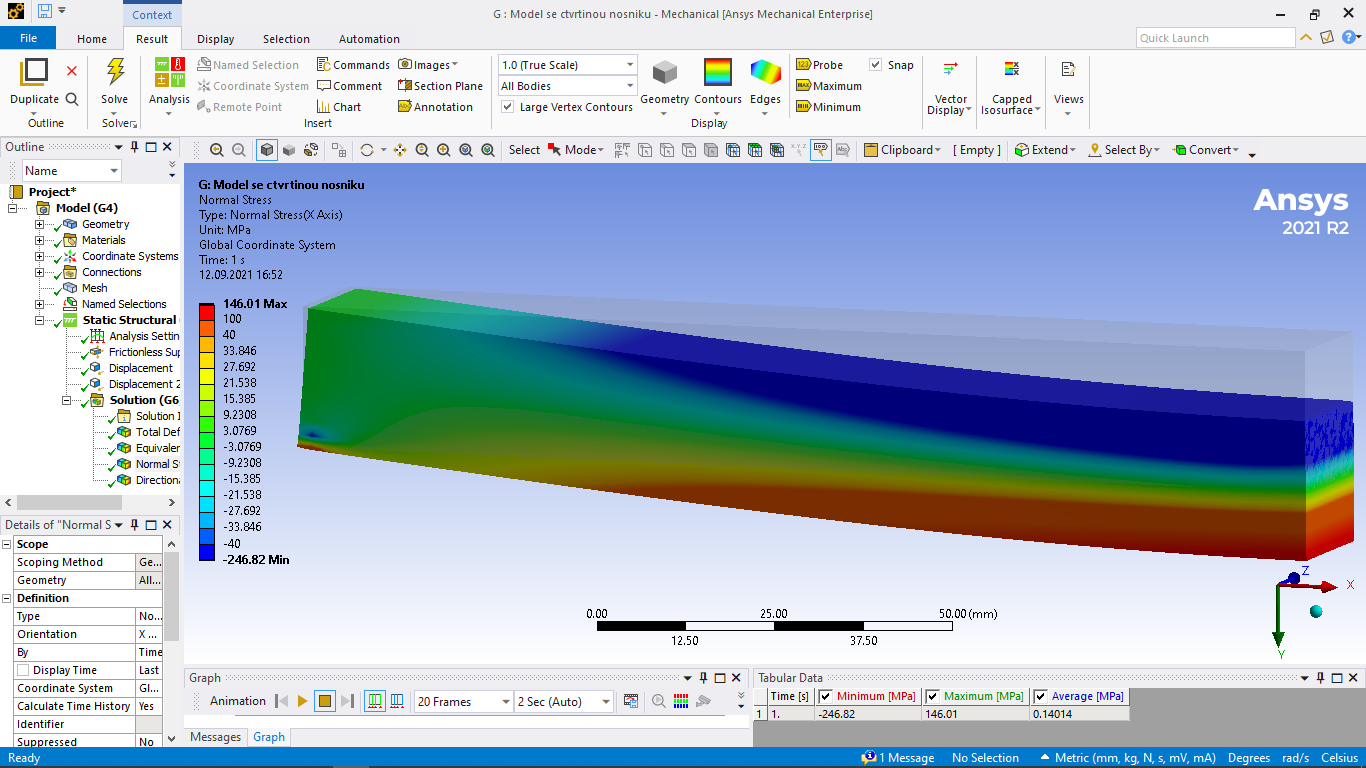
Numerická simulace pro část nosníku šetří strojový čas a nároky na paměť. V tomto případě je možné použít symetrii a počítat pouze čtvrtinu nosníku.
11.2.3.2.3. Tříbodový ohyb, smykové napětí#
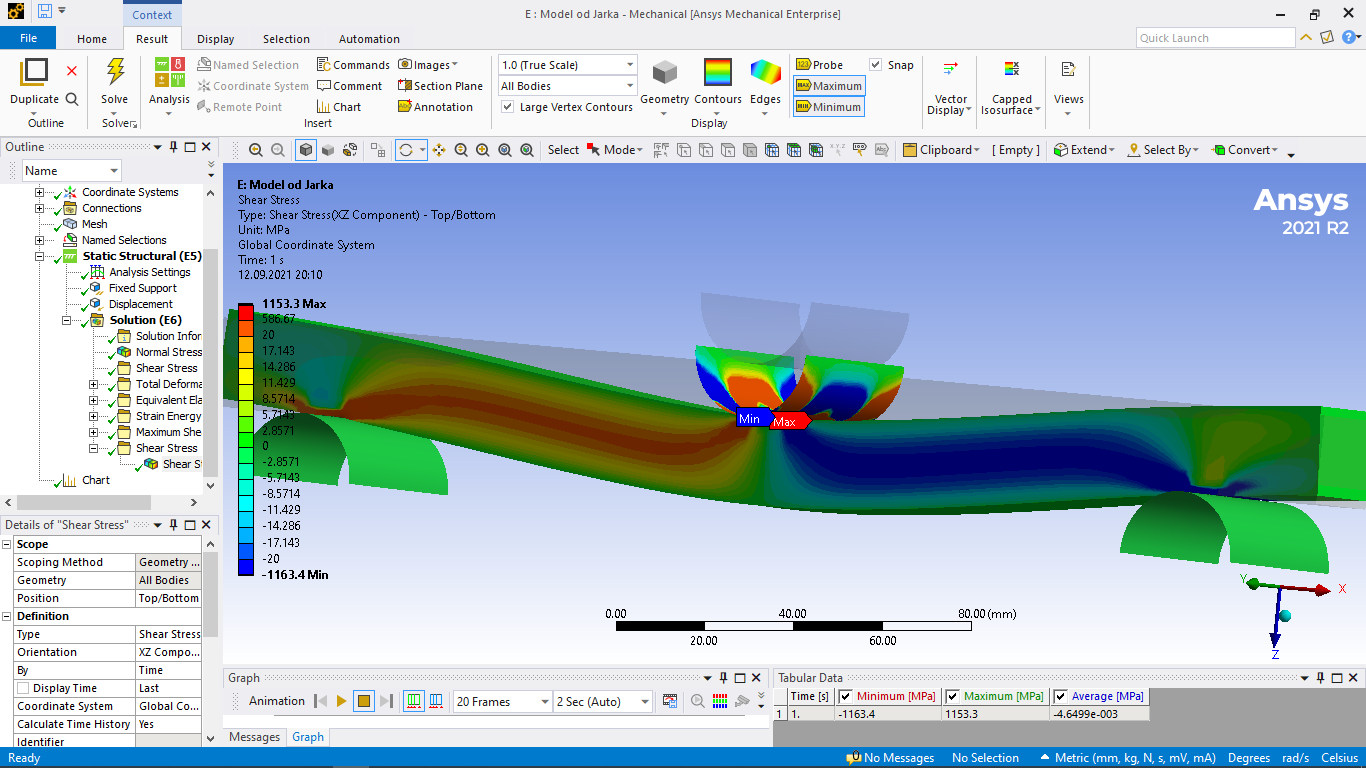
Smykové napětí v levé a pravé polovině nosníku se liší znaménkem, je antisymetrické.
11.2.3.3. Linearizace vektoru posunutí, tenzor deformace#
linearizace, nelineární transfromace a její linearizace
separace rotační, posuvné a deformační složky
tenzor deformace \(\varepsilon\)
Komponenty \(\varepsilon_{ii}\) jsou normálové deformace, \(\varepsilon_{ij}\) pro \(i\neq j\) jsou smykové deformace.
Normálová deformace udává, o kolik procent se materiál v daném směru prodlouží (kladná hodnota) nebo zkrátí (záporná hodnota). Smyková deformace udává, jak se změní pravé úhly (polovina změny velikosti úhlu v obloukové míře).